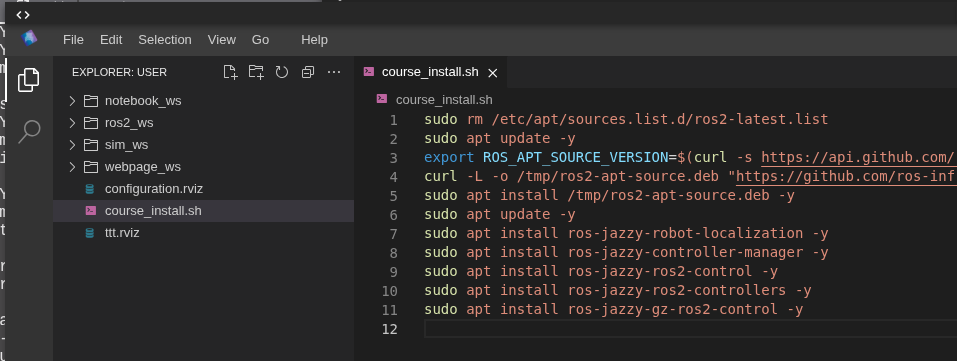
According to the video, when the rosject is started, it should open the shell and run an installation script that installs all required packages. When I start the rosject, the script is run, but it seems it can’t locate some of the packages. This is the output of the script:
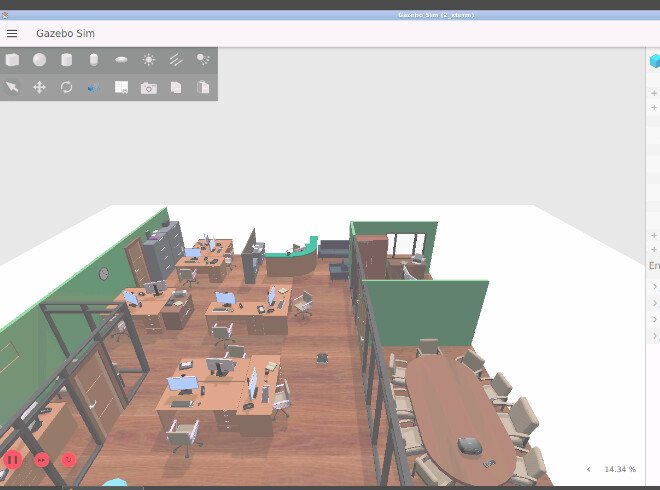
Furthermore, if I then try to source the setup.bash and run the simulation, Gazebo does open with a correct scene, but without the robot. The output after launching the simulation is as follows (after which an active shell prompt is give):
[INFO] [launch]: All log files can be found below /home/user/.ros/log/2025-06-10-14-07-45-423287-4_xterm-1801
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [launch.user]: Robots:
[INFO] [launch.user]: Launching namespace= with init_pose= {'x': '0.0', 'y': '0.0', 'z': '0.2', 'roll': '0.0', 'pitch': '0.0', 'yaw': '0.0'}
[ERROR] [launch]: Caught exception in launch (see debug for traceback): "package 'controller_manager' not found, searching: ['/home/user/sim_ws/install/teleop_twist_keyboard', '/home/user/sim_ws/install/rosbot_xl_utils', '/home/user/sim_ws/install/rosbot_xl_gazebo', '/home/user/sim_ws/install/rosbot_xl', '/home/user/sim_ws/install/rosbot_xl_bringup', '/home/user/sim_ws/install/rosbot_xl_controller', '/home/user/sim_ws/install/rosbot_xl_description', '/home/user/sim_ws/install/ros_components_description', '/home/user/sim_ws/install/nav2_common', '/home/user/sim_ws/install/husarion_gz_worlds', '/home/simulations/ros2_sims_ws/install/rmw_cyclonedds_cpp', '/home/user/ros2_ws/install/dds_tests_pkg', '/opt/ros/jazzy']"
I was running this via the virtual desktop like in the video, as I don’t have Linux environment at the moment. Also, I don’t have that much experience on Linux, so it seemed prudent to do it on the environment provided. I tried updating apt and then running the course_install script again, but that didn’t help.
Output of update:
Hit:1 http://security.ubuntu.com/ubuntu noble-security InRelease
Hit:2 http://archive.ubuntu.com/ubuntu noble InRelease
Hit:3 http://archive.ubuntu.com/ubuntu noble-updates InRelease
Hit:4 http://archive.ubuntu.com/ubuntu noble-backports InRelease
Get:5 http://packages.ros.org/ros2/ubuntu noble InRelease [4676 B]
Err:5 http://packages.ros.org/ros2/ubuntu noble InRelease
The following signatures were invalid: EXPKEYSIG F42ED6FBAB17C654 Open Robotics <info@osrfoundation.org>
Reading package lists... Done
W: GPG error: http://packages.ros.org/ros2/ubuntu noble InRelease: The following signatures were invalid: EXPKEYSIG F42ED6FBAB17C654 Open Robotics <info@osrfoundation.org>
E: The repository 'http://packages.ros.org/ros2/ubuntu noble InRelease' is not signed.
N: Updating from such a repository can't be done securely, and is therefore disabled by default.
N: See apt-secure(8) manpage for repository creation and user configuration details.
output of install script:
Hit:1 http://security.ubuntu.com/ubuntu noble-security InRelease
Hit:2 http://archive.ubuntu.com/ubuntu noble InRelease
Hit:3 http://archive.ubuntu.com/ubuntu noble-updates InRelease
Hit:4 http://archive.ubuntu.com/ubuntu noble-backports InRelease
Get:5 http://packages.ros.org/ros2/ubuntu noble InRelease [4676 B]
Err:5 http://packages.ros.org/ros2/ubuntu noble InRelease
The following signatures were invalid: EXPKEYSIG F42ED6FBAB17C654 Open Robotics <info@osrfoundation.org>
Reading package lists... Done
W: GPG error: http://packages.ros.org/ros2/ubuntu noble InRelease: The following signatures were invalid: EXPKEYSIG F42ED6FBAB17C654 Open Robotics <info@osrfoundation.org>
E: The repository 'http://packages.ros.org/ros2/ubuntu noble InRelease' is not signed.
N: Updating from such a repository can't be done securely, and is therefore disabled by default.
N: See apt-secure(8) manpage for repository creation and user configuration details.
Hit:1 http://archive.ubuntu.com/ubuntu noble InRelease
Hit:2 http://security.ubuntu.com/ubuntu noble-security InRelease
Hit:3 http://archive.ubuntu.com/ubuntu noble-updates InRelease
Hit:4 http://archive.ubuntu.com/ubuntu noble-backports InRelease
Get:5 http://packages.ros.org/ros2/ubuntu noble InRelease [4676 B]
Err:5 http://packages.ros.org/ros2/ubuntu noble InRelease
The following signatures were invalid: EXPKEYSIG F42ED6FBAB17C654 Open Robotics <info@osrfoundation.org>
Reading package lists... Done
W: GPG error: http://packages.ros.org/ros2/ubuntu noble InRelease: The following signatures were invalid: EXPKEYSIG F42ED6FBAB17C654 Open Robotics <info@osrfoundation.org>
E: The repository 'http://packages.ros.org/ros2/ubuntu noble InRelease' is not signed.
N: Updating from such a repository can't be done securely, and is therefore disabled by default.
N: See apt-secure(8) manpage for repository creation and user configuration details.
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
E: Unable to locate package ros-jazzy-robot-localization
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
E: Unable to locate package ros-jazzy-controller-manager
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
E: Unable to locate package ros-jazzy-ros2-control
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
E: Unable to locate package ros-jazzy-ros2-controllers
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
E: Unable to locate package ros-jazzy-gz-ros2-control
e: and it seems the course install.sh does include the apt udate
Yes, thank you, this solution worked, although now the simulation is not responding to the teleop node. However, as that is a different problem, I’ll mark this one solved, and look a bit more into the new one before opening a new thread (if needed)