Sorry about that.
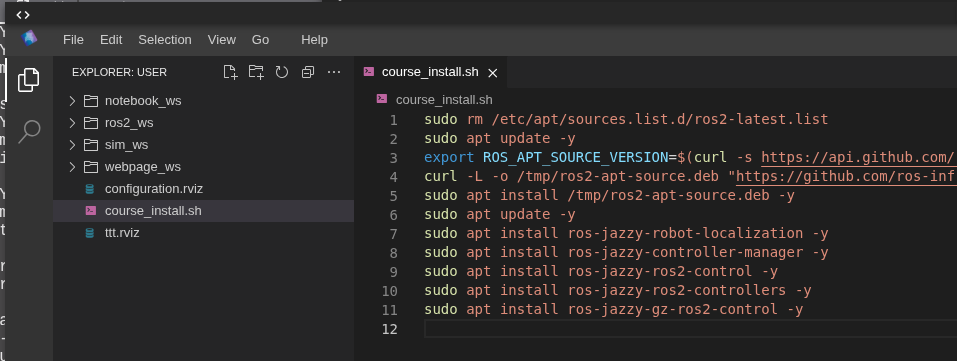
Please locate the course_install.sh file in the code editor and replace the content with this:
sudo rm /etc/apt/sources.list.d/ros2-latest.list
sudo apt update -y
export ROS_APT_SOURCE_VERSION=$(curl -s https://api.github.com/repos/ros-infrastructure/ros-apt-source/releases/latest | grep -F "tag_name" | awk -F\" '{print $4}')
curl -L -o /tmp/ros2-apt-source.deb "https://github.com/ros-infrastructure/ros-apt-source/releases/download/${ROS_APT_SOURCE_VERSION}/ros2-apt-source_${ROS_APT_SOURCE_VERSION}.$(. /etc/os-release && echo $VERSION_CODENAME)_all.deb" # If using Ubuntu derivates use $UBUNTU_CODENAME
sudo apt install /tmp/ros2-apt-source.deb -y
sudo apt update -y
sudo apt install ros-jazzy-robot-localization -y
sudo apt install ros-jazzy-controller-manager -y
sudo apt install ros-jazzy-ros2-control -y
sudo apt install ros-jazzy-ros2-controllers -y
sudo apt install ros-jazzy-gz-ros2-control -y
Then run the following on any terminal:
bash ~/course_install.sh
After this, you should be able to launch the simulation without any issues.
source ~/sim_ws/install/setup.bash
ros2 launch rosbot_xl_gazebo simulation.launch.py