Hello there,
can somebody help me? I don’t understand what I have to do to create the spot table.
What are the spots that I have to register?
How do I make a table in yaml? I may have missed something.
Thank you in advance
pablo
Hello there,
can somebody help me? I don’t understand what I have to do to create the spot table.
What are the spots that I have to register?
How do I make a table in yaml? I may have missed something.
Thank you in advance
pablo
Hi @pabled91 ,
You can’t exactly make a “table” in yaml. To clearly explain the idea, the instruction is tell you to tabulate the spots on the map.
Making the yaml file is quite simple. You can have a look at the provided example package that you would have downloaded (cloned) from the git repository.
Here is an example:
<your_ros2_node_name>: # name of the ros2 node that reads the yaml file
ros__parameters: # note that there are two underscores
label1: # this is the label name for your spot
pos_x: <float_value> # position x
pos_y: <float_value>
pos_z: <float_value>
quat_x: <float_value> # quaternion x
quat_y: <float_value>
quat_z: <float_value>
quat_w: <float_value>
label2:
...
...
label3:
...
...
I hope this helps.
Regards,
Girish
Tank you for your help @girishkumar.kannan.
I just still have a missing point: which spots do I have to save?
I have the impression that there is something missing in the document.
Hi @pabled91 ,
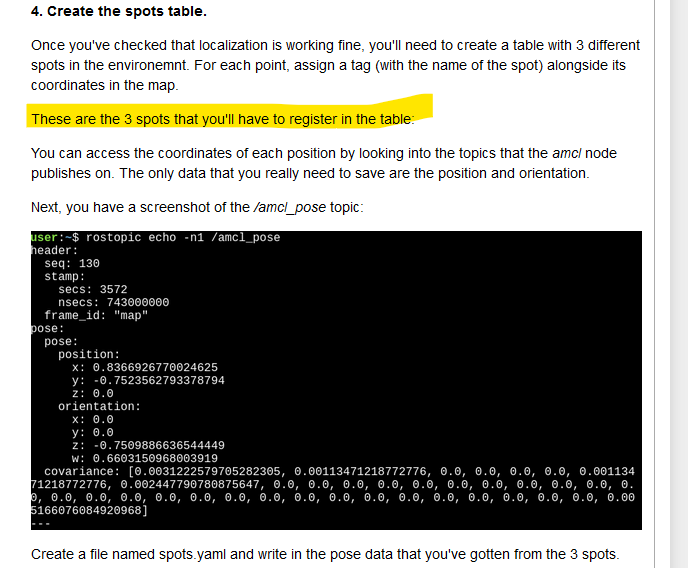
The three spots that you need to save are provided as pictures in the instructions notebook.
You will see two corner positions and the pedestrian crossing zone (as three pictures). Just stop more or less at the same spots and record the positions (from Odometry). Save the positions as yaml file later. Use these positions later to test the path planning goals.
I hope this clarifies your doubt. Let me know if you are still unclear.
Regards,
Girish
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.