Hello @bayodesegun @girishkumar.kannan
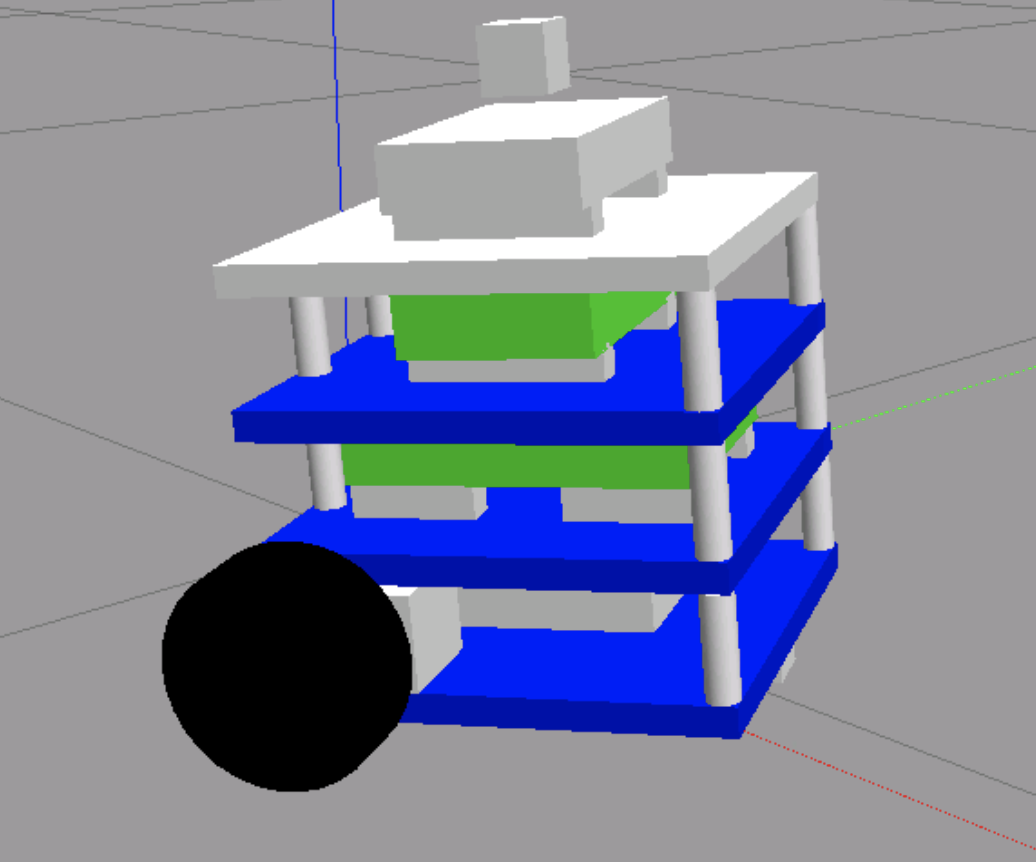
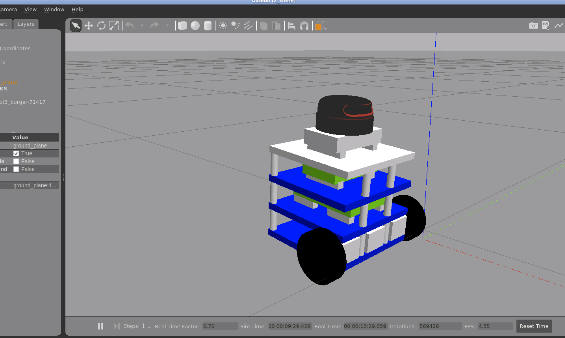
I am trying to build the tb3 burger from ROS2 URDF and am at a point where i have mostly completed unit 5 section but i cannot see the laser mesh in gazebo but i see as a cylinder when i rotate the laser. can you please check and point me to resolve this item ?
<!-- Visual Laser Model to be rotated -->
<link name="laser_scan_model_link">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<mesh filename="package://ros2_urdf_project/meshes/sensors/rplidar.dae" scale="1.0 1.0 1.0"/>
</geometry>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0.0204"/>
<geometry>
<cylinder length="0.0408" radius="0.037493"/>
</geometry>
</collision>
<inertial>
<mass value="0.01"/>
<origin rpy="0 0 0" xyz="0 0 0.0204"/>
<inertia ixx="6.066578520833334e-06" ixy="0" ixz="0" iyy="6.072950163333333e-06" iyz="0" izz="9.365128684166666e-06"/>
</inertial>
</link>
Logs from the launch.
[rviz2-2] at line 156 in /tmp/binarydeb/ros-galactic-tf2-0.17.2/src/buffer_core.cpp
[spawner-5] [INFO] [1737811327.514481278] [spawner_joint_state_broadcaster]: Configured and started joint_state_broadcaster
[INFO] [spawner-5]: process has finished cleanly [pid 4901]
[INFO] [spawner-6]: process started with pid [4942]
[spawner-6] [INFO] [1737811328.748107281] [spawner_joint_trajectory_controller]: Loaded joint_trajectory_controller
[spawner-6] [INFO] [1737811328.795863058] [spawner_joint_trajectory_controller]: Configured and started joint_trajectory_controller
[INFO] [spawner-6]: process has finished cleanly [pid 4942]
[INFO] [spawner-7]: process started with pid [4967]
[spawner-7] [INFO] [1737811330.775392399] [spawner_velocity_controller]: Loaded velocity_controller
[spawner-7] [INFO] [1737811330.802094161] [spawner_velocity_controller]: Configured and started velocity_controller
[INFO] [spawner-7]: process has finished cleanly [pid 4967]
In rviz.
In gazebo