I’m having trouble with the packages in the default ROSJect, and trying to install additional packages. I need to:
Install some additional ROS2 packages (such as ign-ros2-control, find-object-2d, plus a few others)
Update the existing packages to the latest versions in apt (the default installed ones are about a year old and don’t have some required elements to run Husarion’s examples)
Last year I seem to recall that I do both of the above in a ROSJect and it would save the state. However, now, every time I relaunch the rosject I have to reinstall everything. Is there a better solution to the above, or something obvious that I am missing?
Ok. Thank you for the response.
Is it possible to get the base humble packages ROSJect updated to the current ubuntu packages? This would save a lot of time.
Also, for this install script:
Do I just put the apt commands?
Is there feedback to the user on how long the install is taking?
This is possible but might break other rosjects using the same distro, so the best approach is to update these only for the rosject that needs it.
Yes, just put the install or setup commands in the order you want them executed (for sudo apt-get install commands, don’t forget to put sudo apt-get update -y first). Here is a sample script.
If you have just a few packages to install, the solution proposed by @bayodesegun does the job.
You said:
such as ign-ros2-control, find-object-2d, plus a few others
Could you tell us which are the packages that you need to install?
If you need to do an upgrade in the humble base itself every time that you open the rosject, I think this may be a frustrating experience if it takes too much time.
If you tell us the list of packages, we can see how long it takes.
If you have just a few packages, you can create the ~/course_install.sh as proposed by Bayode.
If you see that it takes too much time to install everything every time you open a rosject, we can possibly update the base and install the packages you need.
Thank you for your replies. I’ve been trialing various combinations of packages to install. Aside from the manually additional packages, it’s still a little unclear to me what packages are causing problems. In short, trying to use a launch file from the nav2_common package causes a C++ traits lookup issue. But I’ve yet to track down the ROS2 humble package causing the issue. However, upgrading the ROS2 install resolves the issue, so it’s one of the packages!
Not a problem at all! Those are things that make our platform improve and provide to you guys the tools that are really useful for you.
Do not hesitate to suggest, request, advice about other things that you may need or find useful. We will do our best to make your life easier in that sense!
we already have the new Humble base with ROS Humble upgraded. Things worth knowing:
Your existing rosjects will still use the old image.
To use the new upgraded base, you just have to create a new ROS Humble rosject.
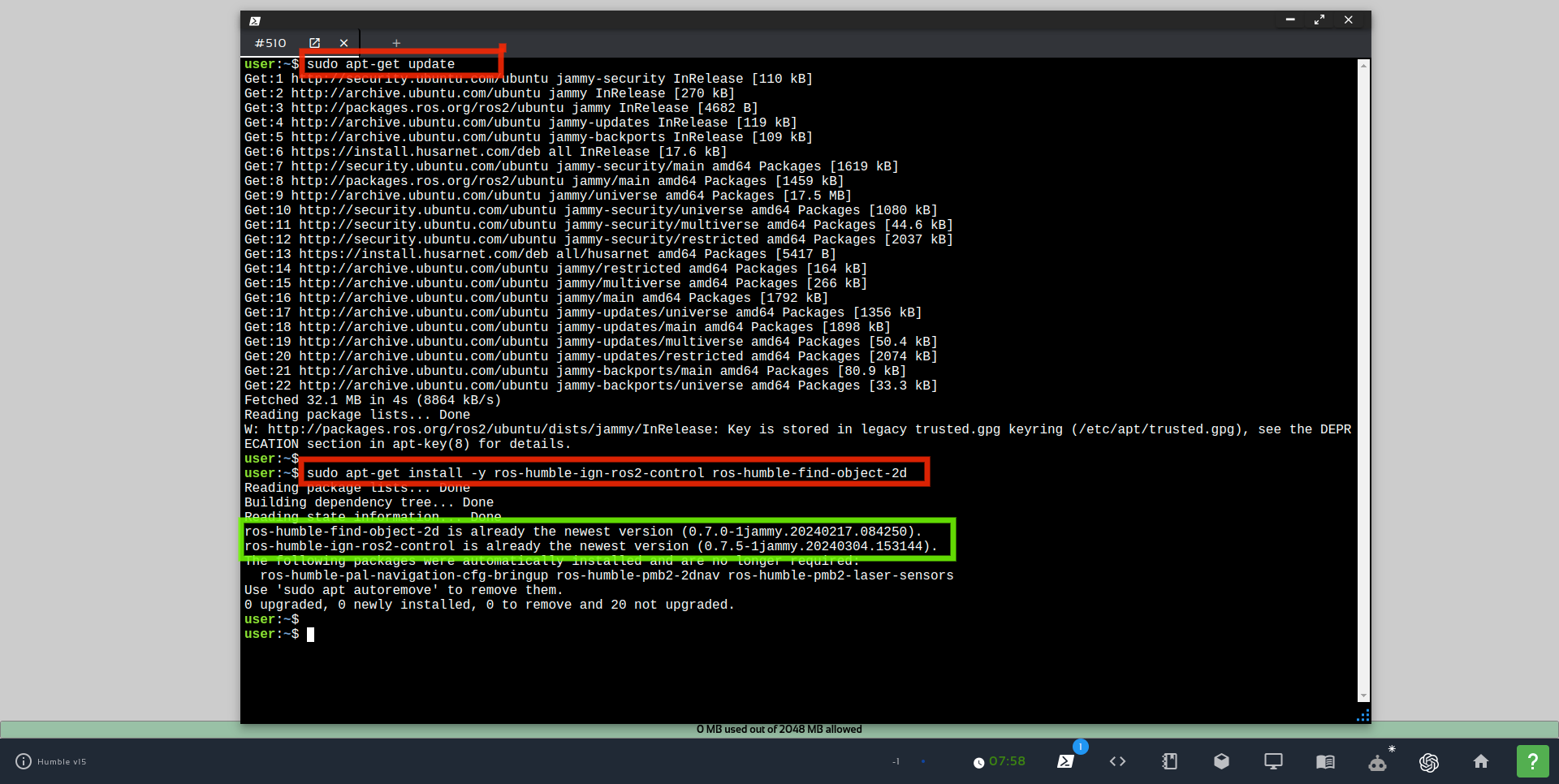
The new base already contains ros-humble-ign-ros2-control and ros-humble-find-object-2d, as we can see in the image below. Please let us know how your tests on the new base go: