opened simualated world using
source ~/simulation_ws/devel/setup.bash
roslaunch realrobotlab main.launch
roslaunch realrobotlab main.launch
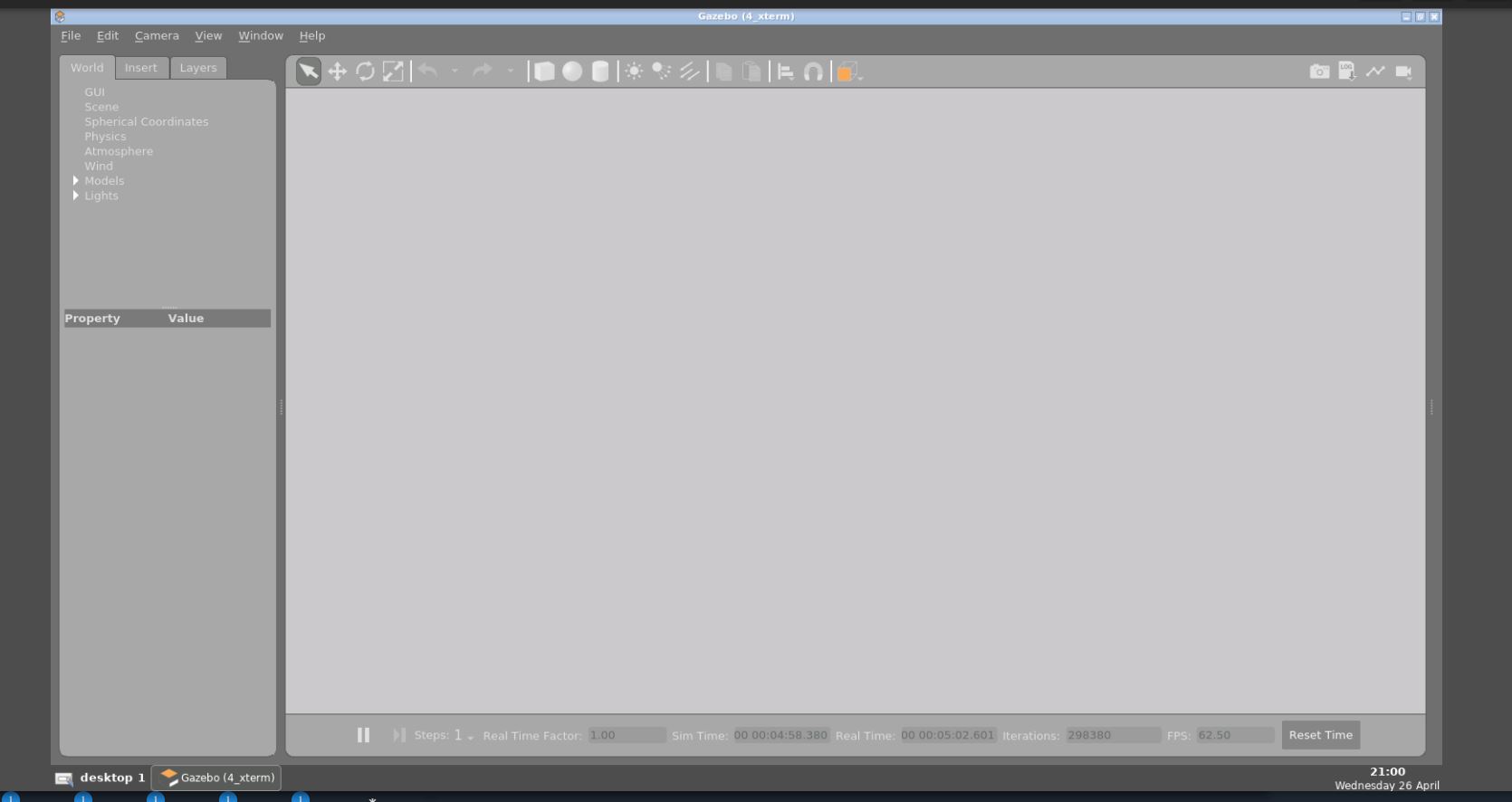
Can you try zooming out the simulation? I think the camera starts such that it’s too zoomed out.
you are a genius!! thank you very much
You can set the initial camera view: In the file simulation_ws/src/realrobotlab_simulation/realrobotlab/worlds/realrobotlab_v1.world
Set the initial pose as follows:
<gui fullscreen='0'>
<camera name='user_camera'>
<pose>1.76558 -0.10675 2.36879 0 1.0138 3.13918</pose>
<view_controller>orbit</view_controller>
<projection_type>perspective</projection_type>
</camera>
</gui>
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.