The ros1_bridge is only needed when using the real robot. Since the rosject simulation is already in ROS 2, you don’t need to run the bridge. Is that what’s happening here?
Try running the simulation and moving the robot with teleop (ros2 run teleop_twist_keyboard teleop_twist_keyboard). If it moves, you are ready to go
Try launching it again from a new terminal, the one you are using might be confused with the multiple sourcing.
If it still doesn’t work, maybe something got changed in simulation_ws, so you can delete this rosject and fork a new copy with this link: https://app.theconstructsim.com/l/3de839f6/
Thank you for your response.
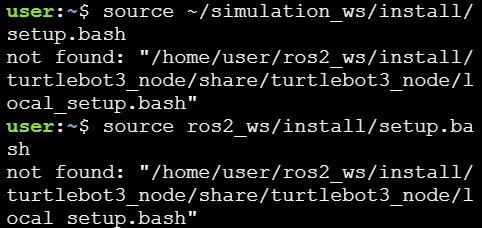
I tried copying from your link, but the responses to the previous commands do not change:
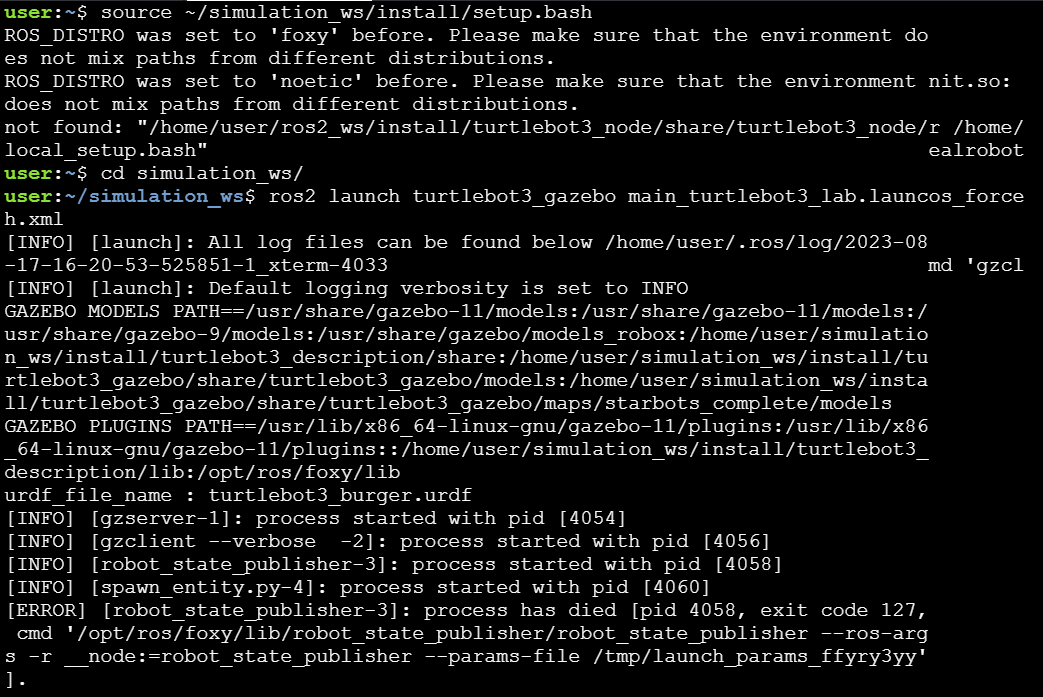
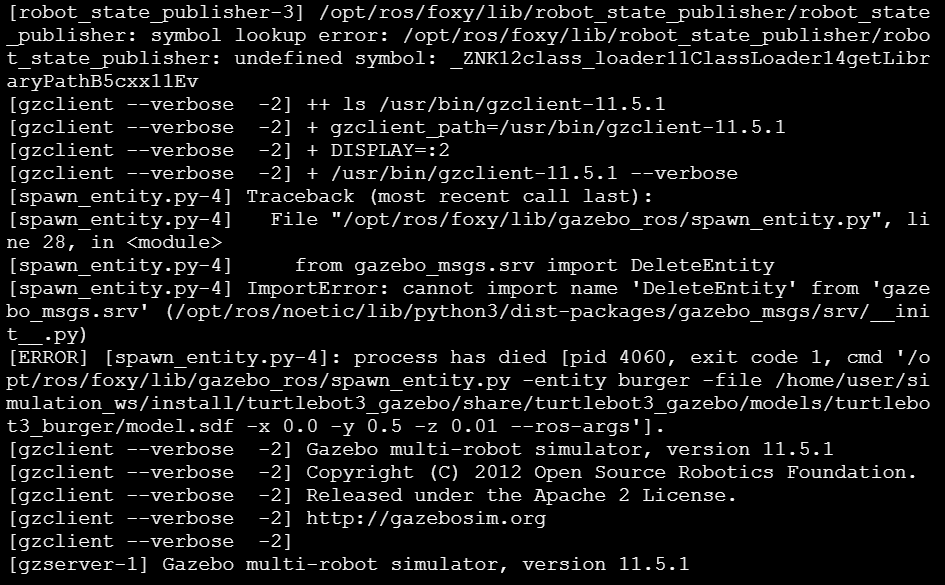
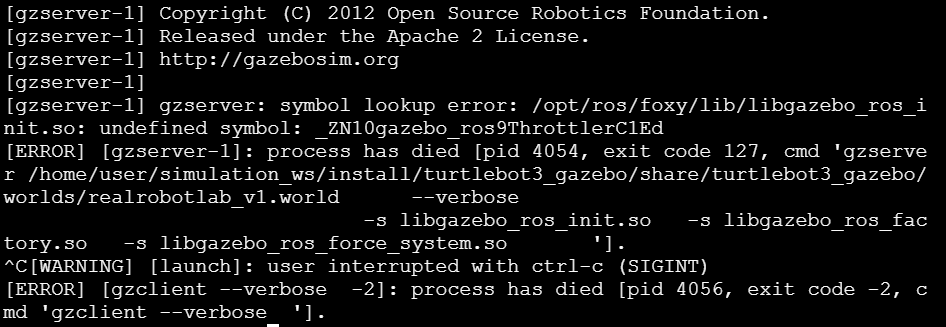
If I run “ros2 launch turtlebot3_gazebo main_turtlebot3_lab.launch.xml” the simulation starts, even if the model is completely white (something is missing?)
However, even if it starts, how can I work inside the ros2_ws workspace if I cannot source the setup.bash after compiling it for any changes?
Thanks in advance