I have finished this module and I really like the turtlebot in there and also how it is spawned into the empty cafe and turtlebot in there moves perfectly from point A to B…,
I want to create that kind of environment with turtlebot within one of my ROSJECTs, and I can see that this is like a customised turtlebot package within this module , which is different to the turtlebot I saw in github (GitHub - turtlebot/turtlebot: The turtlebot stack provides all the basic drivers for running and using a TurtleBot.)…, can you please me a link to download this perfect turtlebot in this module ? so that I can replicate this module’s environment into my ROSJECT , so that I can test more and make modifications and also try to enhance my bot with it,
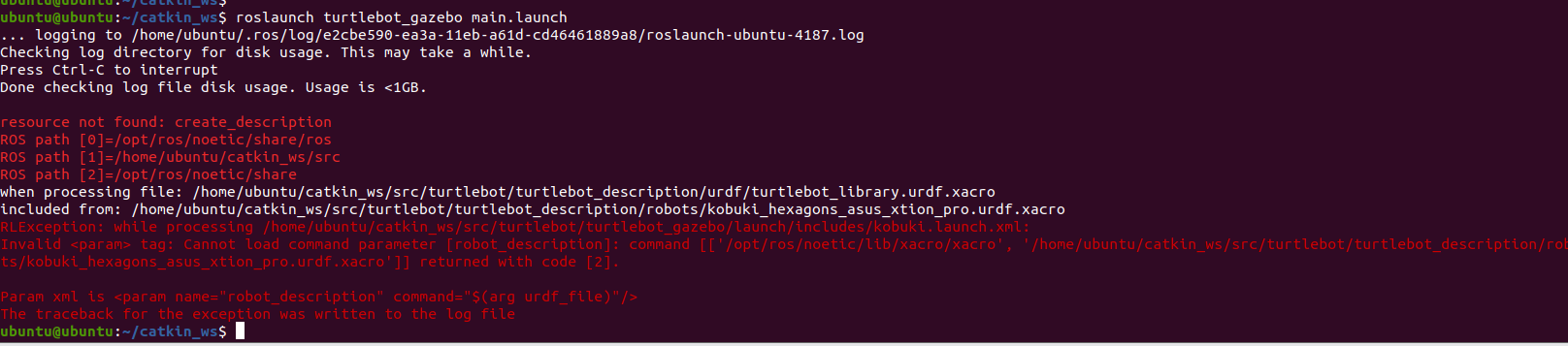
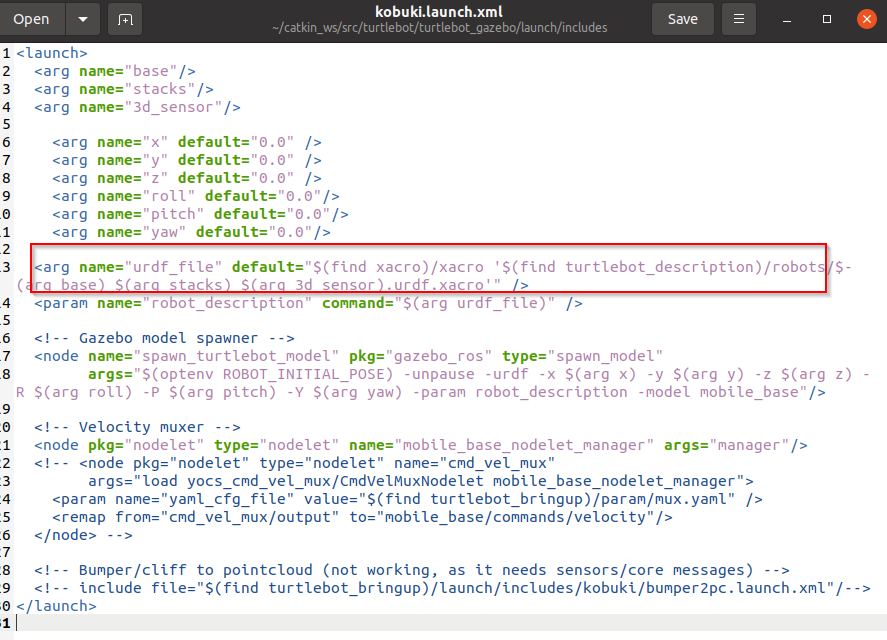
It looks like you are not really using the noetic branch since you are trying to run the command xacro.py. In the noetic branch the command is only xacro, as you can see here: