Good morning 
I Finished the course of ROS Navigation in 5 days and i am trying to run o my robot locally, however i am having some problems with object avoidance. My global and local costmap works perfectly.
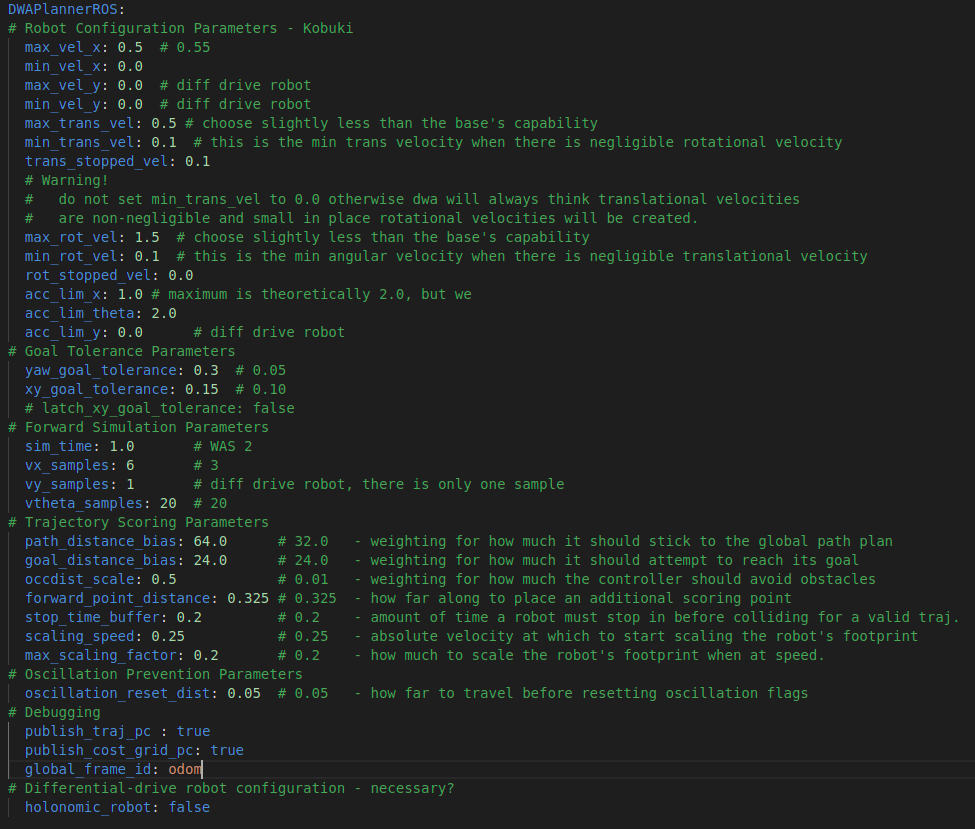
Below are pictures of my configuration files:
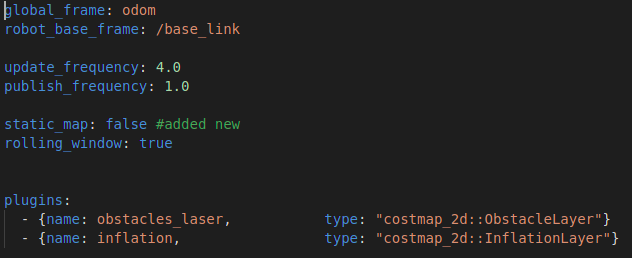
LOCAL COSTMAP PARAMS
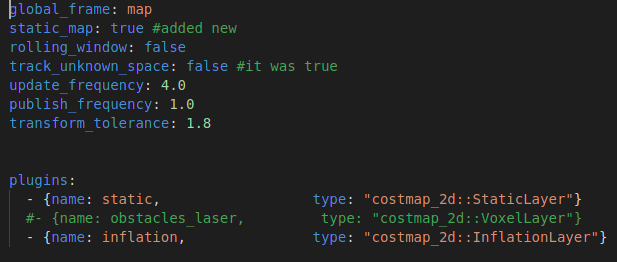
GLOBAL COSTMAP PARAMS
COMMON PARAMS
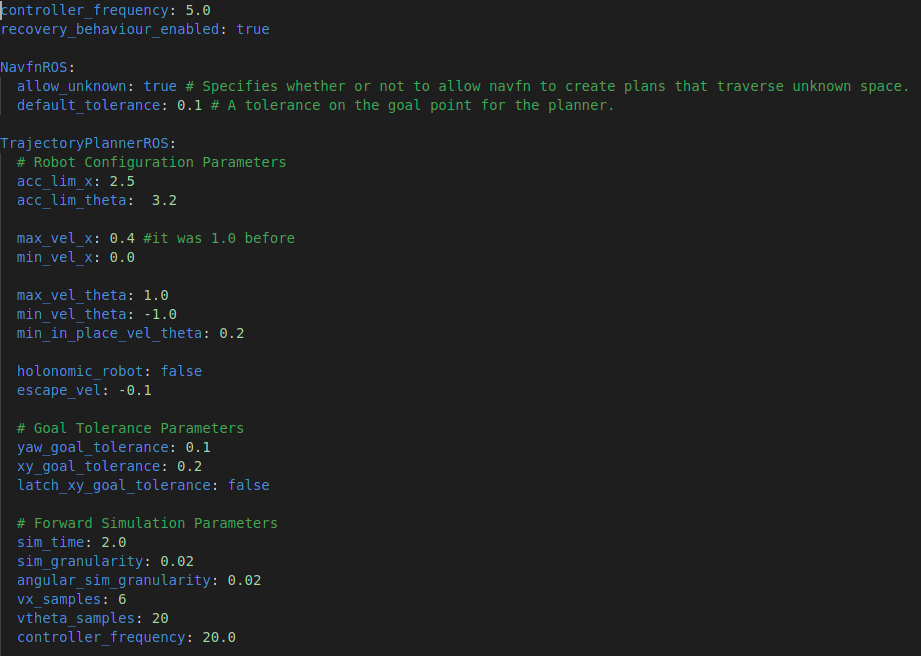
MOVE BASE PARAMS

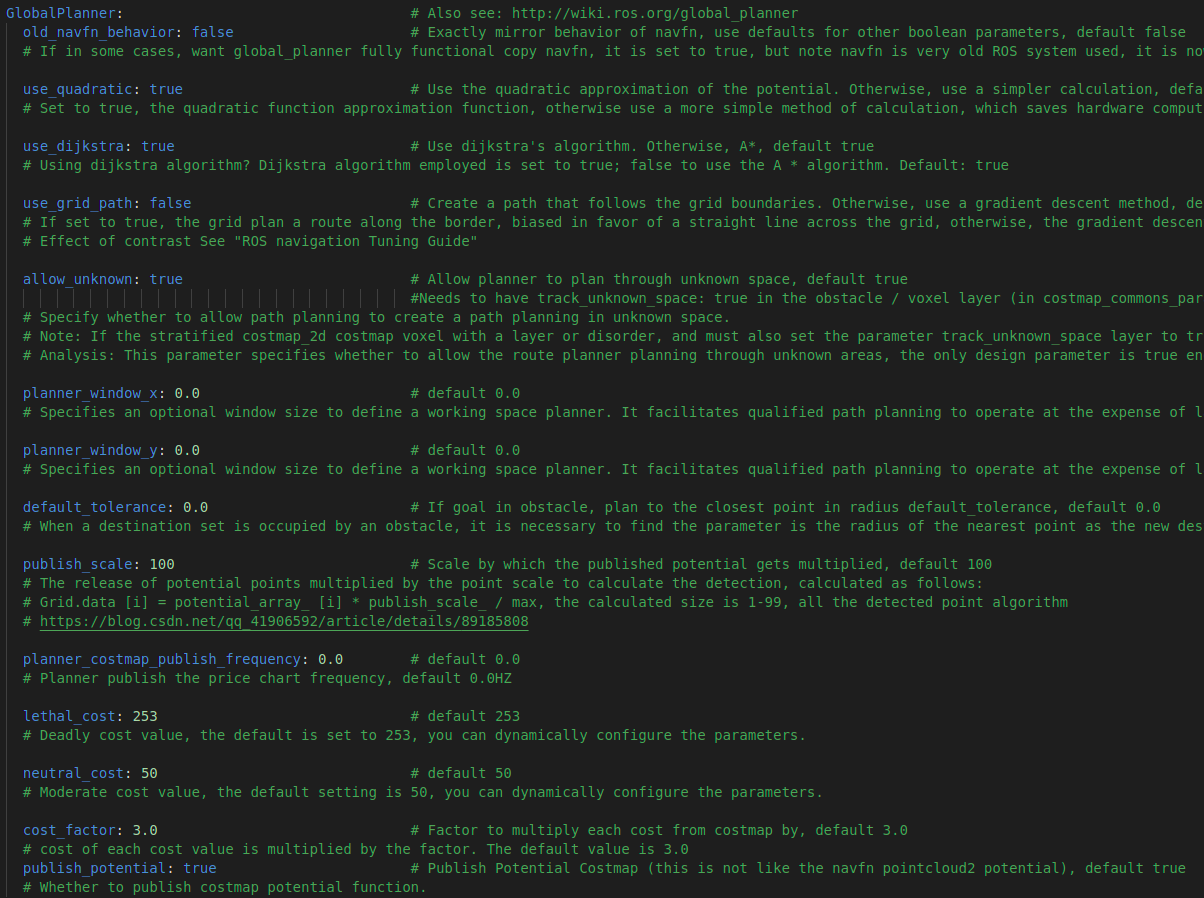
GLOBAL PLANNER PARAMS
LOCAL PLANNER PARAMS
Can anyone help me with this?
Thanks