I know there was a post on the same problem but I’ve tried the solution offered there without any progress.
Hi,
Could you be a bit more specific on the issue and maybe share the code you are executing and the uni exercise where you are experiencing this?
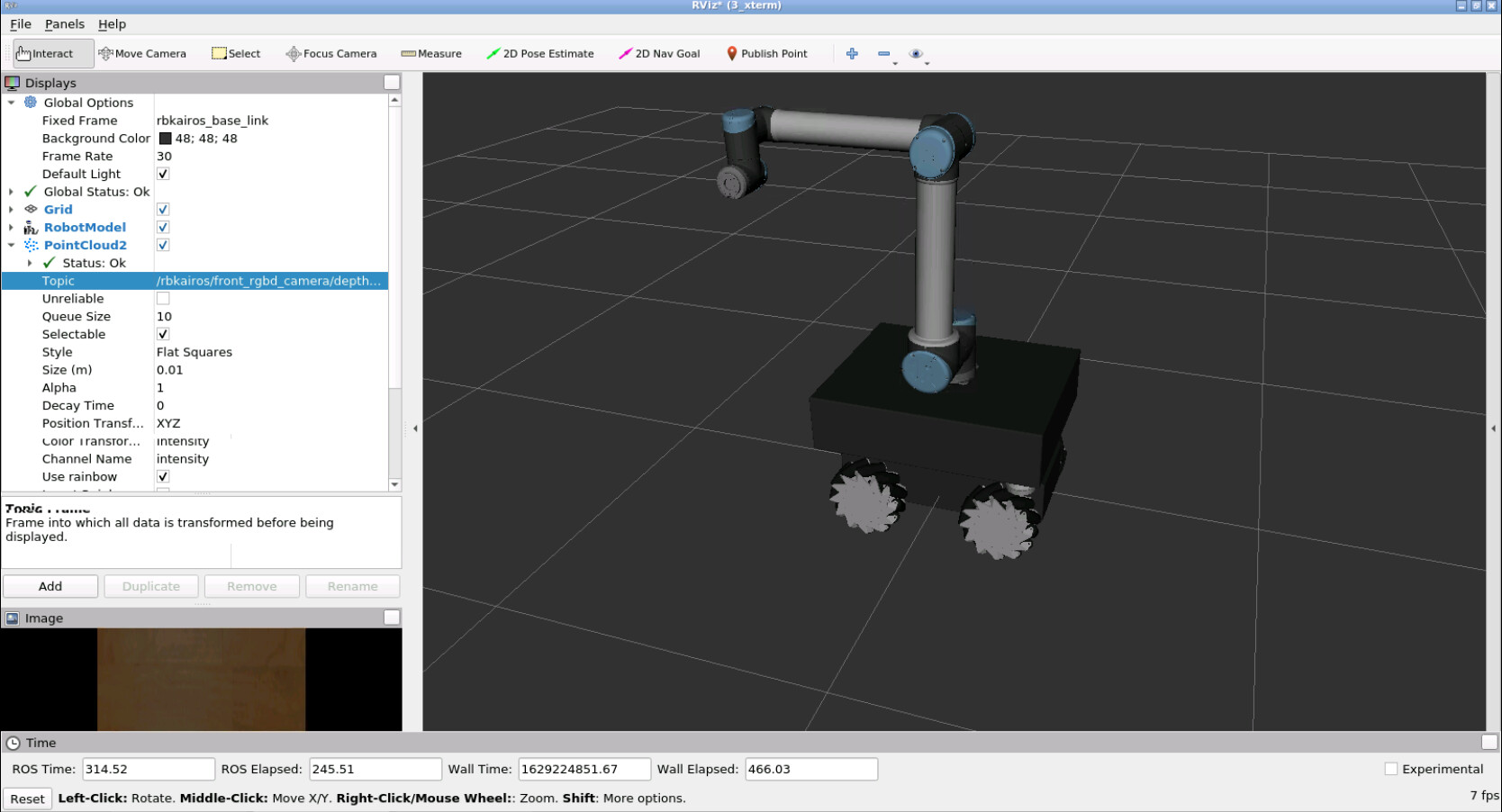
I’ve actually moved the robot a little bit backward and the obstacle was detected.
Thank you
1 Like