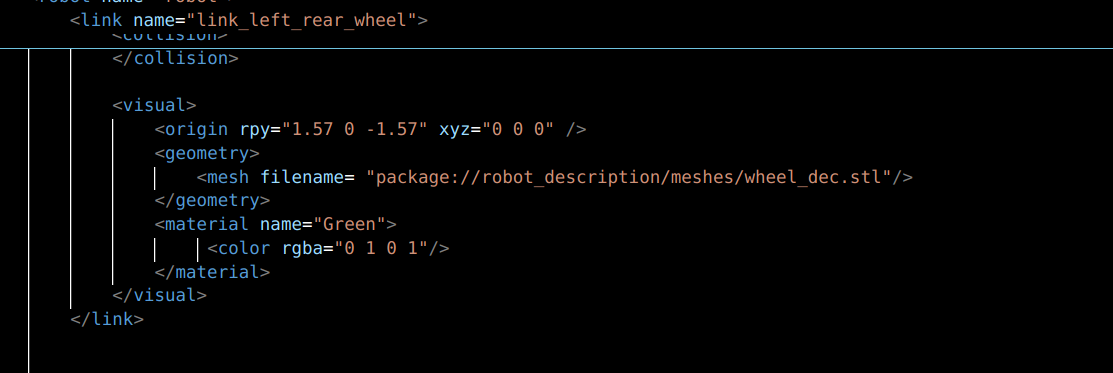
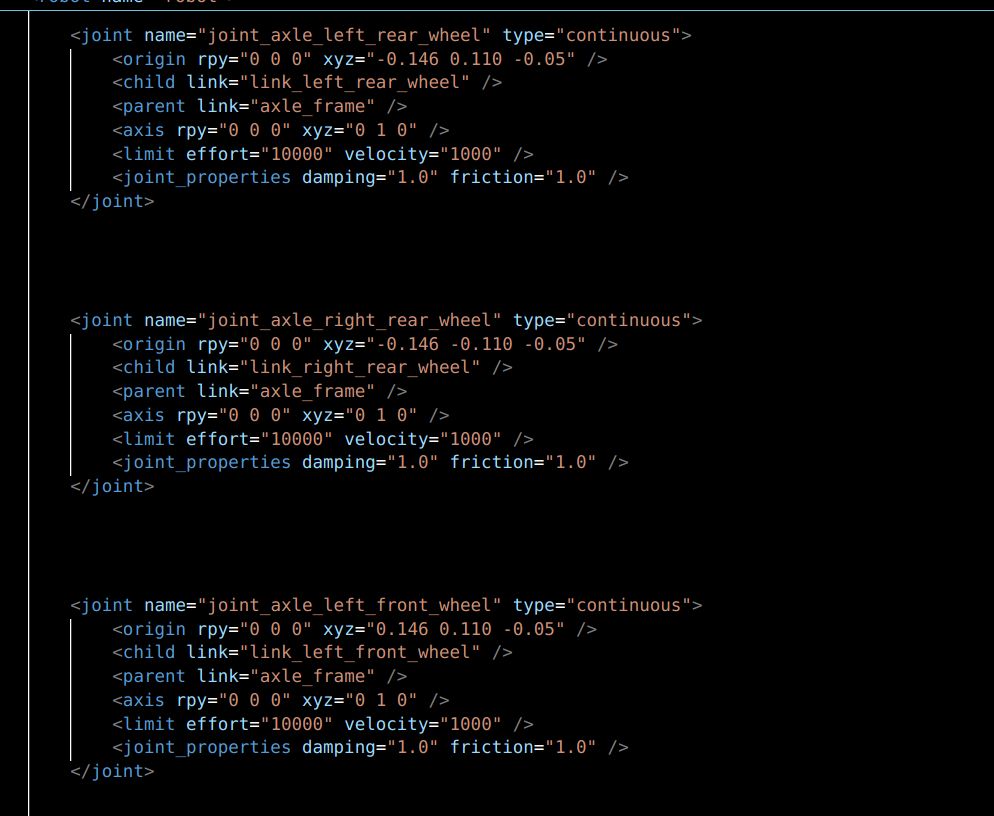
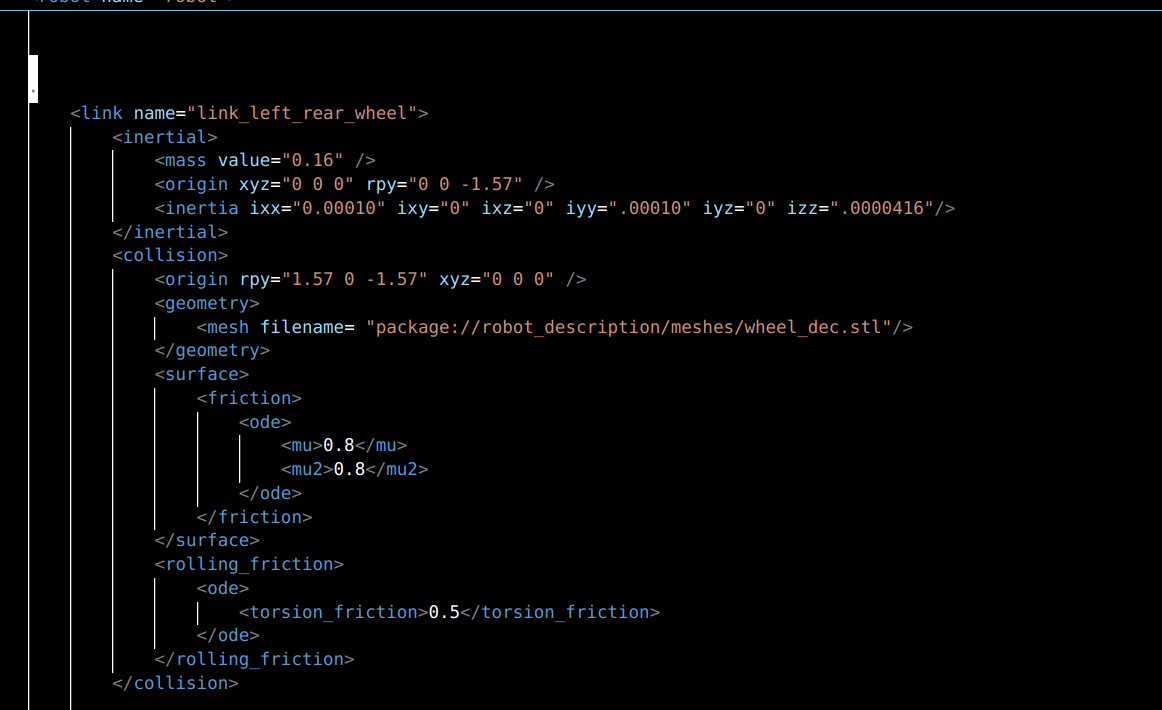
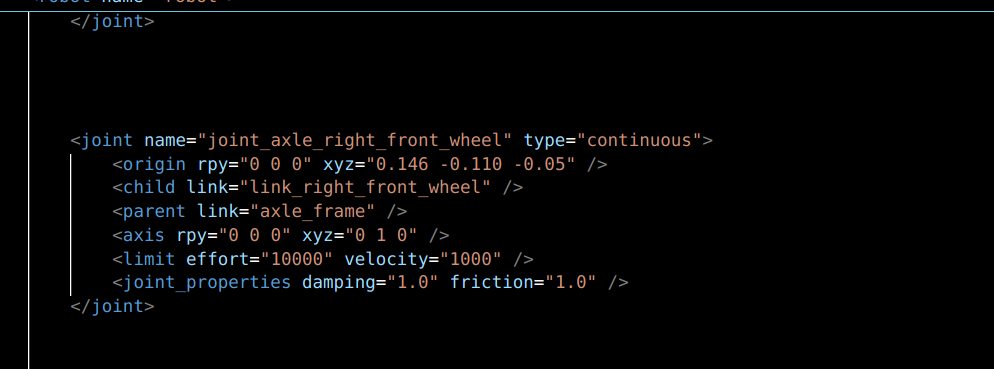
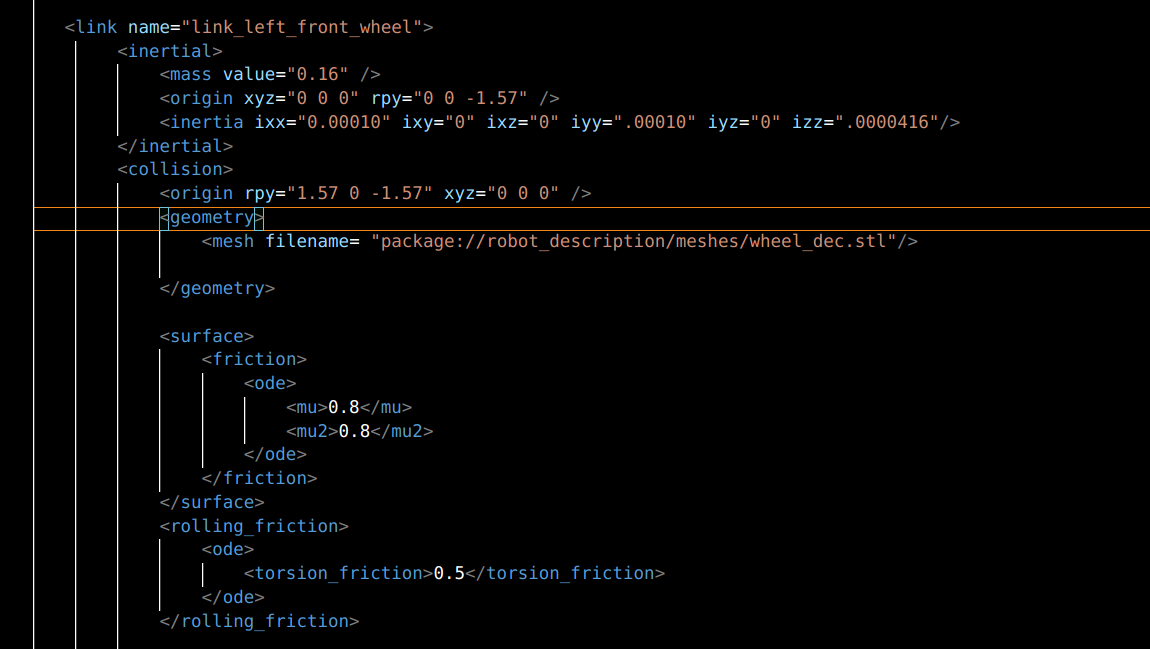
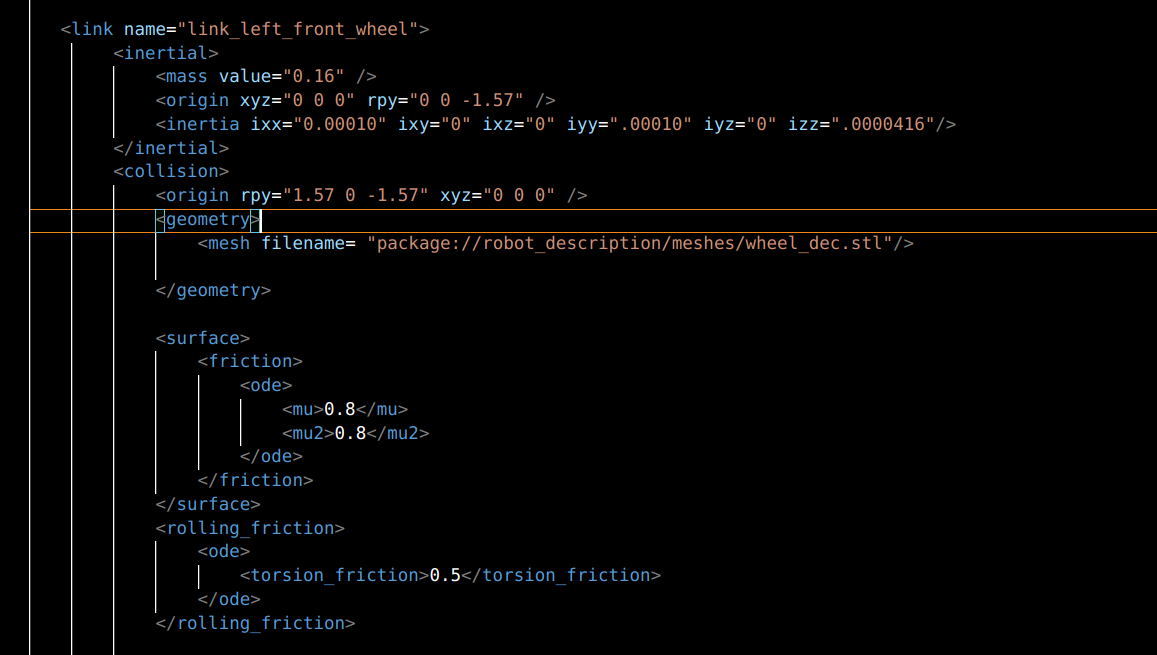
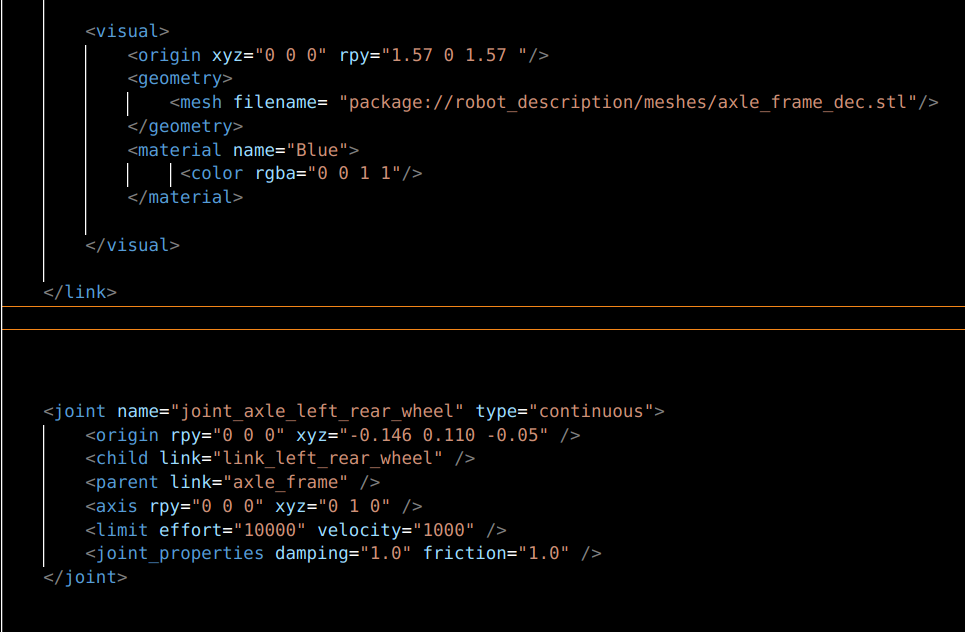
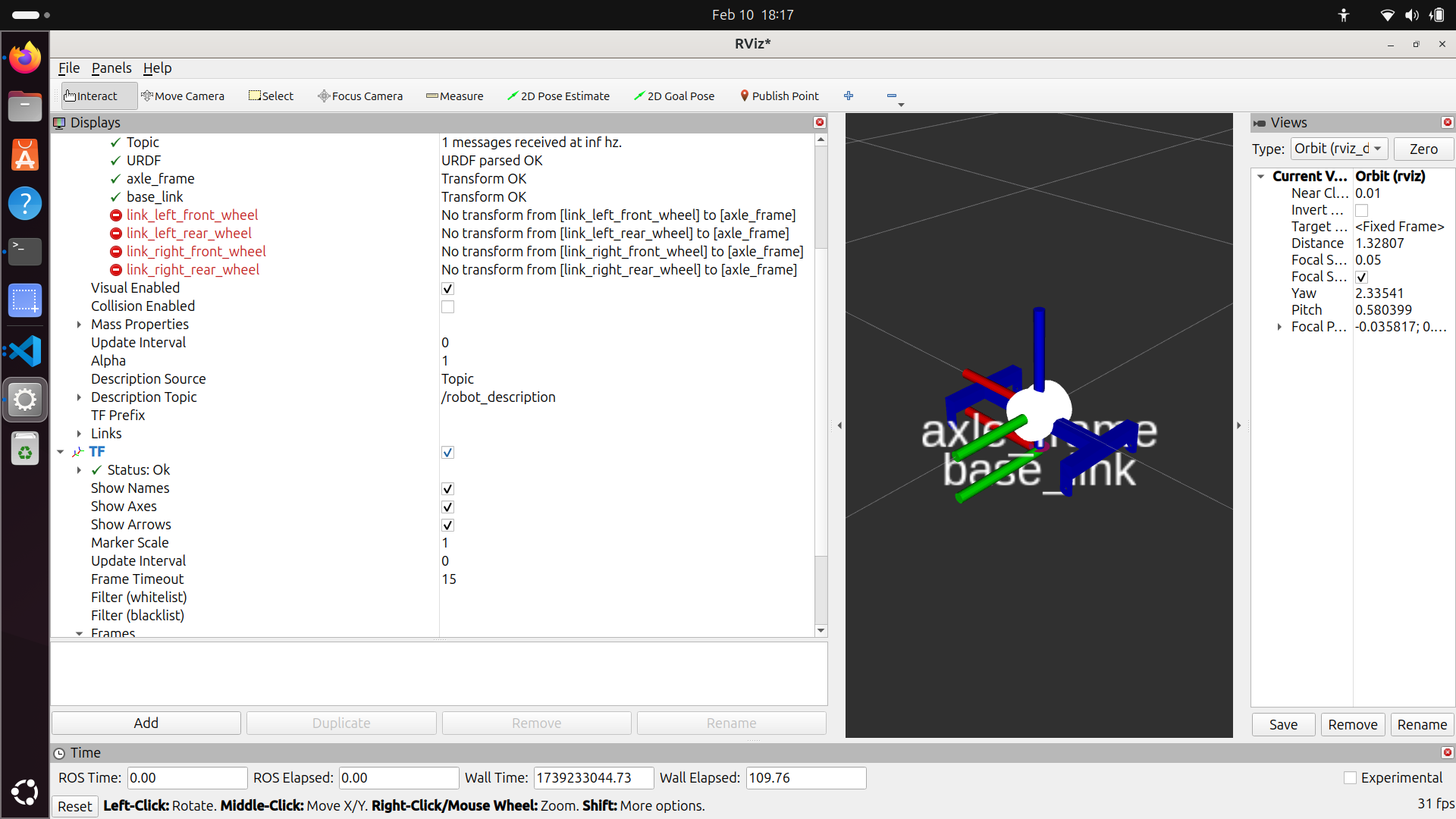
rviz loads the joint information to the base to axle, but not from the axle to any of the four wheels.
Hi @ROxX ,
I strongly recommend that you take the URDF for ROS2 course to learn how to create a proper robot description file.
Going through your most recent posts, I understand that you lack some basic knowledge that is needed to proceed with ROS2 ecosystem and framework (ROS in general).
Please take both the courses URDF for ROS2 and TF ROS2. These will be immensely helpful to you at this point.
Solution to your problem: You need to enable joint_state_publisher.
Regards,
Girish
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.