Hello,
The Jupyter Notebook for “ROS2 Basics Python Real Robot Project” says to open rviz. I would like to do this in order to debug how my robot reacts to the laser scan data, both in simulation and on the real robot.
However, all that’s written about rviz is just the command: “rviz”
As a beginner, naively opening a new shell and typing “rviz” doesn’t work. So I tried the following:
Shell 1:
source /opt/ros/noetic/setup.bash
source ~/simulation_ws/devel/setup.bash
roslaunch realrobotlab main.launch
Shell 2:
source ~/.bashrc_bridge
ros2 run ros1_bridge dynamic_bridge --bridge-all-topics
Shell 3:
source /opt/ros/noetic/setup.bash
source ~/simulation_ws/devel/setup.bash
rviz
But Rviz shows a number of errors. Is this a problem with the environment or am I launching Rviz incorrectly?
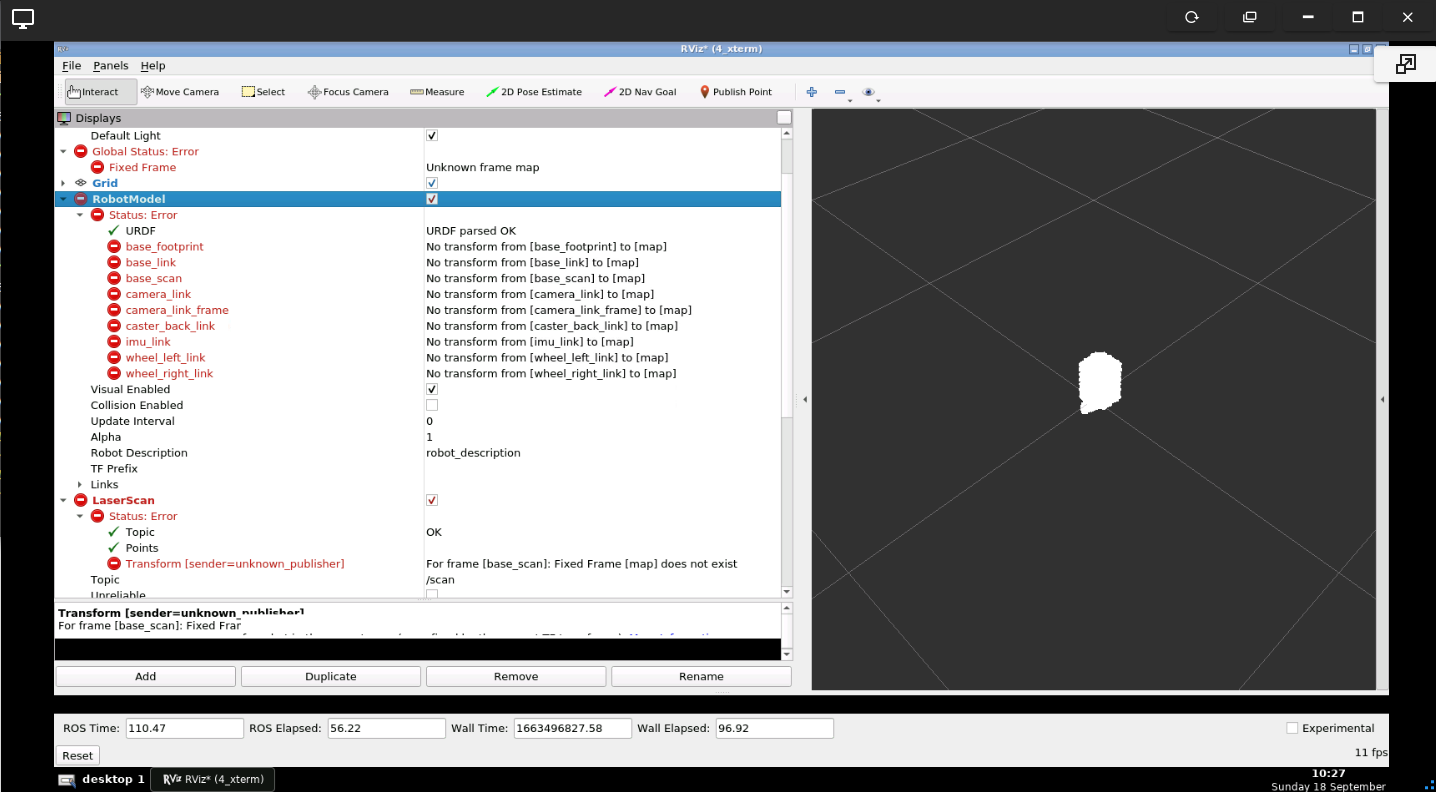
Here’s a selection of the errors shown in Rviz:
Unknown frame map
No transform from [base_footprint] to [map]
For frame [base_scan]: Fixed Frame [map] does not exist
And here is the output on launching rviz. There are a number of warnings that look similar to what can be seen in Rviz.
QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to ‘/tmp/runtime-user’
[ INFO] [1663497516.670904547]: rviz version 1.14.9
[ INFO] [1663497516.671415679]: compiled against Qt version 5.12.8
[ INFO] [1663497516.672585413]: compiled against OGRE version 1.9.0 (Ghadamon)
[ INFO] [1663497517.070804487]: Forcing OpenGl version 0.
[ INFO] [1663497518.294739822, 37.049000000]: Stereo is NOT SUPPORTED
[ INFO] [1663497518.295137568, 37.049000000]: OpenGL device: llvmpipe (LLVM 10.0.0, 256 bits)
[ INFO] [1663497518.295467081, 37.050000000]: OpenGl version: 3.1 (GLSL 1.4).
[rospack] Error: package ‘turtlebot3_description’ not found
[librospack]: error while executing command
[ERROR] [1663497519.995810563, 37.645000000]: Could not load resource [package://turtlebot3_description/meshes/bases/burger_base.dae]: Unable to open file “package://turtlebot3_description/meshes/bases/burger_base.dae”.
[rospack] Error: package ‘turtlebot3_description’ not found
[librospack]: error while executing command
[ERROR] [1663497520.282432199, 37.699000000]: Could not load resource [package://turtlebot3_description/meshes/sensors/lds.dae]: Unable to open file “package://turtlebot3_description/meshes/sensors/lds.dae”.
[rospack] Error: package ‘turtlebot3_description’ not found
[librospack]: error while executing command
[ERROR] [1663497520.474633164, 37.761000000]: Could not load resource [package://turtlebot3_description/meshes/sensors/rpi_camera_v2_short.dae]: Unable to open file “package://turtlebot3_description/meshes/sensors/rpi_camera_v2_short.dae”.
[rospack] Error: package ‘turtlebot3_description’ not found
[librospack]: error while executing command
[ERROR] [1663497520.699325324, 37.849000000]: Could not load resource [package://turtlebot3_description/meshes/sensors/rpi_camera_v2_short.stl]: Unable to open file “package://turtlebot3_description/meshes/sensors/rpi_camera_v2_short.stl”.
[rospack] Error: package ‘turtlebot3_description’ not found
[librospack]: error while executing command
[ERROR] [1663497520.880701914, 37.926000000]: Could not load resource [package://turtlebot3_description/meshes/wheels/left_tire.dae]: Unable to open file “package://turtlebot3_description/meshes/wheels/left_tire.dae”.
[rospack] Error: package ‘turtlebot3_description’ not found
[librospack]: error while executing command
[ERROR] [1663497521.090437882, 38.020000000]: Could not load resource [package://turtlebot3_description/meshes/wheels/right_tire.dae]: Unable to open file “package://turtlebot3_description/meshes/wheels/right_tire.dae”.
In case it is helpful, here is the output when launching the main launch file for the rosject. I notice that there are some warnings and error messages.
user:~$ roslaunch realrobotlab main.launch… logging to /home/user/.ros/log/dc722690-373d-11ed-a17b-0242ac120003/roslaunch-4_xterm-1074.logChecking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.started roslaunch server http://4_xterm:33063/
SUMMARY
PARAMETERS
- /gazebo/enable_ros_network: True
- /robot_description: <?xml version="1…
- /robot_state_publisher_turtlebot3/publish_frequency: 5.0
- /rosdistro: noetic
- /rosversion: 1.15.11
- /use_sim_time: True
NODES
/
gazebo (gazebo_ros/gzserver)
gazebo_gui (gazebo_ros/gzclient)
robot_state_publisher_turtlebot3 (robot_state_publisher/robot_state_publisher)
spawn_urdf (gazebo_ros/spawn_model)auto-starting new master
process[master]: started with pid [1098]
ROS_MASTER_URI=http://4_xterm:11311setting /run_id to dc722690-373d-11ed-a17b-0242ac120003
process[rosout-1]: started with pid [1117]
started core service [/rosout]
process[gazebo-2]: started with pid [1131]
process[gazebo_gui-3]: started with pid [1141]
process[spawn_urdf-4]: started with pid [1149]
process[robot_state_publisher_turtlebot3-5]: started with pid [1152]
++ ls /usr/bin/gzclient-11.5.1
- gzclient_path=/usr/bin/gzclient-11.5.1
- DISPLAY=:2
- /usr/bin/gzclient-11.5.1 --verbose -g /opt/ros/noetic/lib/libgazebo_ros_paths_plugin.so -g /opt/ros/noetic/lib/libgazebo_ros_api_plugin.so __name:=gazebo_gui __log:=/home/user/.ros/log/dc722690-373d-11ed-a17b-0242ac120003/gazebo_gui-3.log
Gazebo multi-robot simulator, version 11.5.1
Copyright (C) 2012 Open Source Robotics Foundation.
Released under the Apache 2 License.
http://gazebosim.org[Wrn] [GuiIface.cc:200] g/gui-plugin is really loading a SystemPlugin. To load a GUI plugin please use --gui-client-plugin
Gazebo multi-robot simulator, version 11.5.1
Copyright (C) 2012 Open Source Robotics Foundation.
Released under the Apache 2 License.
http://gazebosim.org[ INFO] [1663497439.309936882]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1663497439.312697693]: waitForService: Service [/gazebo/set_physics_properties] has not been advertised, waiting…
[Msg] Waiting for master.
[Msg] Connected to gazebo master @ http://172.18.0.3:11345
[Msg] Publicized address: 172.18.0.3
[ INFO] [1663497439.643890625]: Finished loading Gazebo ROS API Plugin.
[ INFO] [1663497439.646410423]: waitForService: Service [/gazebo_gui/set_physics_properties] has not been advertised, waiting…
[Msg] Waiting for master.
[Msg] Connected to gazebo master @ http://172.18.0.3:11345
[Msg] Publicized address: 172.18.0.3
[Wrn] [GuiIface.cc:298] Couldn’t locate specified .ini. Creating file at “/home/user/.gazebo/gui.ini”
Warning [parser.cc:723] Can not find the XML attribute ‘version’ in sdf XML tag for model: ring_road_v2. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will be used
Warning [parser.cc:723] Can not find the XML attribute ‘version’ in sdf XML tag for model: Pedestrian. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will be used
Warning [parser.cc:723] Can not find the XML attribute ‘version’ in sdf XML tag for model: Traffic Light. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will be used
Warning [parser.cc:723] Can not find the XML attribute ‘version’ in sdf XML tag for model: triangular_prism_direccion_obligada. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will be used
Warning [parser.cc:723] Can not find the XML attribute ‘version’ in sdf XML tag for model: triangular_prism. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will be used
[Wrn] [GuiIface.cc:120] QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to ‘/tmp/runtime-user’
Warning [parser.cc:723] Can not find the XML attribute ‘version’ in sdf XML tag for model: triangular_prism_direccion_obligada. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will be used
Warning [parser.cc:723] Can not find the XML attribute ‘version’ in sdf XML tag for model: triangular_prism_direccion_obligada. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will be used
Warning [parser.cc:723] Can not find the XML attribute ‘version’ in sdf XML tag for model: triangular_prism. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will be used
Warning [parser.cc:723] Can not find the XML attribute ‘version’ in sdf XML tag for model: triangular_prism_pedestrian. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will be used
Warning [parser.cc:723] Can not find the XML attribute ‘version’ in sdf XML tag for model: triangular_prism_pedestrian. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will be used
Warning [parser.cc:723] Can not find the XML attribute ‘version’ in sdf XML tag for model: OverLoard Camera. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will be used
[Msg] Loading world file [/home/user/simulation_ws/src/realrobotlab_simulation/realrobotlab/worlds/realrobotlab_v1.world]
[ INFO] [1663497440.260451179]: waitForService: Service [/gazebo/set_physics_properties] is now available.
[Err] [InsertModelWidget.cc:402] Missing model.config for model “/home/user/.gazebo/models/RubberDucky”
[Err] [InsertModelWidget.cc:402] Missing model.config for model “/home/user/.gazebo/models/lms1xx”
[Err] [InsertModelWidget.cc:402] Missing model.config for model “/home/user/.gazebo/models/media”
[Err] [InsertModelWidget.cc:402] Missing model.config for model “/home/user/.gazebo/models/meshes”
[Err] [InsertModelWidget.cc:402] Missing model.config for model “/home/user/.gazebo/models/turtlebot3_autorace”
[Err] [InsertModelWidget.cc:402] Missing model.config for model “/home/user/.gazebo/models/turtlebot3_autorace_2020”
[Err] [InsertModelWidget.cc:402] Missing model.config for model “/home/user/.gazebo/models/turtlebot3_description”
[Err] [InsertModelWidget.cc:402] Missing model.config for model “/home/user/simulation_ws/src/turtlebot3/turtlebot3_simulations/turtlebot3_gazebo/models/turtlebot3_autorace”
[Err] [InsertModelWidget.cc:402] Missing model.config for model “/home/user/simulation_ws/src/turtlebot3/turtlebot3_simulations/turtlebot3_gazebo/models/turtlebot3_autorace_2020”
