Hello @lfernandez ,
The Rviz config file is loaded automatically. The steps to follow are:
- Download the repo:
cd ~/ros2_ws/src
git clone https://bitbucket.org/theconstructcore/nav2_pkgs.git
- Compile your workspace:
cd ~/ros2_ws/
colcon build
source install/setup.bash
- Launch Nav2:
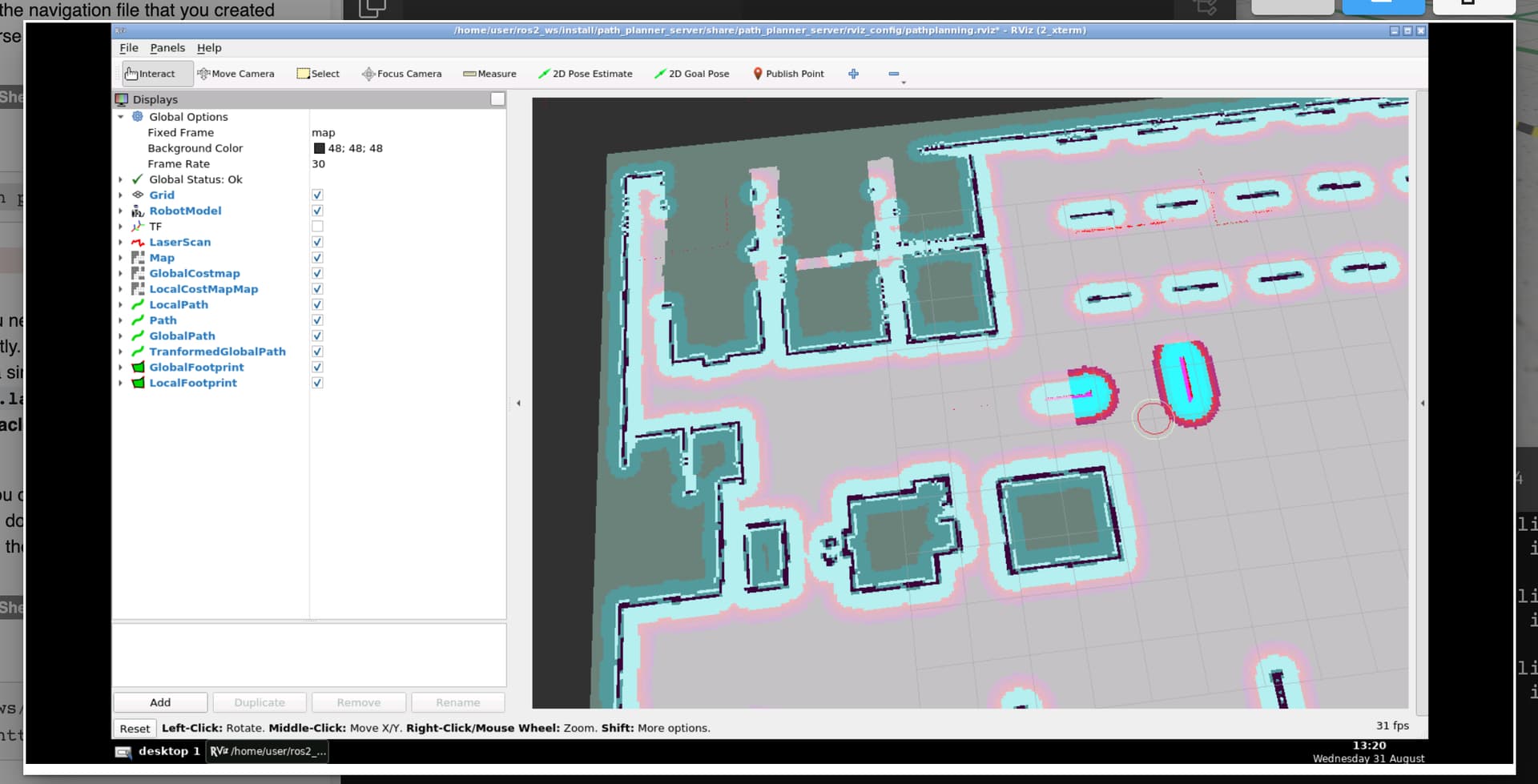
ros2 launch path_planner_server navigation.launch.py
RViz2 will be loaded automatically and you should get something like this: