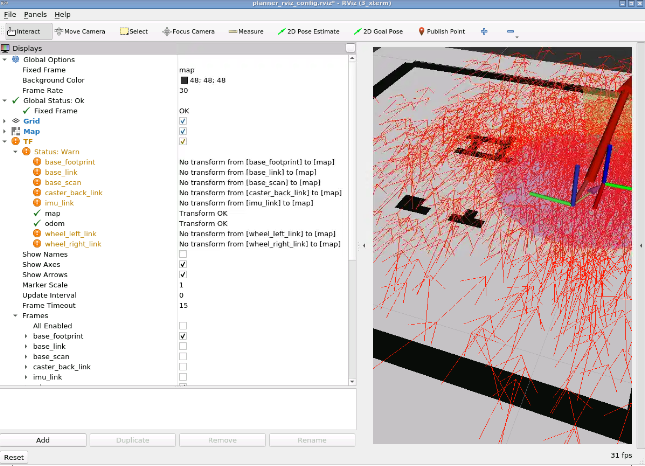
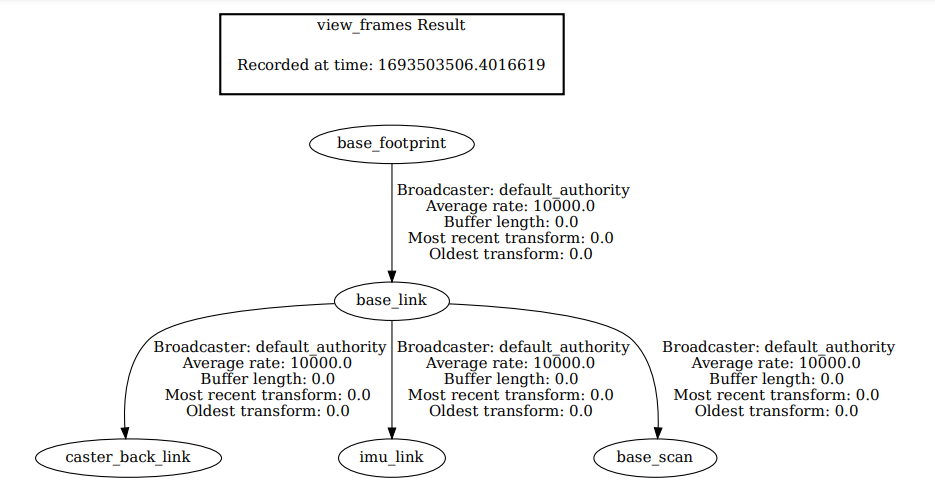
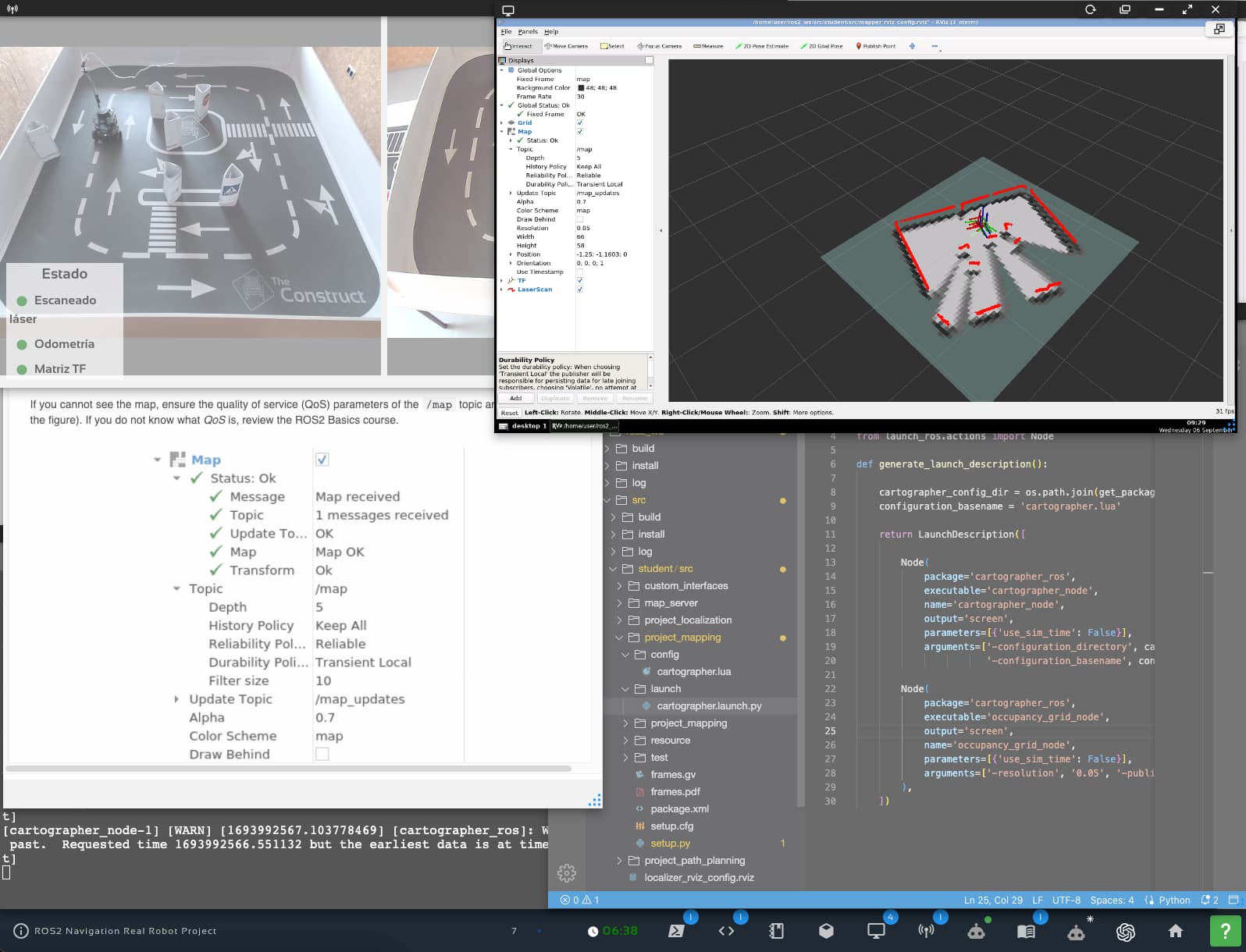
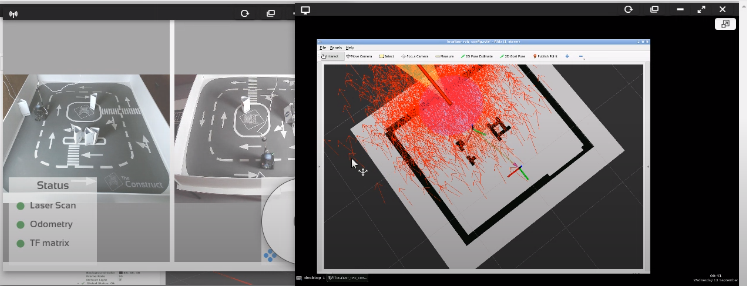
@girishkumar.kannan @rtellez @duckfrost2 I am still stuck. I don’t even get tf to show up properly in rviz2 after establishing the ros1_bridge and launching the cartographer.
I also get this warning: [cartographer_node-1] [WARN] [1693981460.197128385] [cartographer_ros]: W0906 06:24:20.000000 6445 tf_bridge.cc:67] Lookup would require extrapolation into the past. Requested time 1693981459.655794 but the earliest data is at time 1693981459.782910, when looking up transform from frame [odom] to frame [base_footprint].
I’m really suspecting the dynamic_bridge is too slow because it bridges all topics, but I just cannot get parameter_bridge working.
Maybe there’s something wrong with my parameter_bridge files:
load_params.launch
<?xml version="1.0"?>
<launch>
<rosparam file="/home/user/catkin_ws/src/load_params/params/topics_turtlebot.yaml" command="load"/>
</launch>
topics_turtlebot.yaml
topics: [{topic: /tf, type: tf2_msgs/msg/TFMessage, queue_size: 500}, {topic: /tf_static, type: tf2_msgs/msg/TFMessage, queue_size: 500}, {topic: /scan, type: sensor_msgs/msg/LaserScan, queue_size: 100}, {topic: /odom, type: nav_msgs/msg/Odometry, queue_size: 100}, {topic: /clock, type: rosgraph_msgs/msg/Clock, queue_size: 100}, {topic: cmd_vel, type: geometry_msgs/msg/Twist, queue_size: 100}]
I understand that you can try to run the parameter_bridge without entering roslaunch load_params load_params.launch first, but that doesn’t work for me either.
For the possibility that there’s something wrong with my cartographer code, here it is:
cartographer.lua
include "map_builder.lua"
include "trajectory_builder.lua"
options = {
map_builder = MAP_BUILDER,
trajectory_builder = TRAJECTORY_BUILDER,
map_frame = "map",
tracking_frame = "base_footprint",
published_frame = "odom",
odom_frame = "odom",
provide_odom_frame = false,
publish_frame_projected_to_2d = true,
use_odometry = true,
use_nav_sat = false,
use_landmarks = false,
num_laser_scans = 1,
num_multi_echo_laser_scans = 0,
num_subdivisions_per_laser_scan = 1,
num_point_clouds = 0,
lookup_transform_timeout_sec = 0.2,
submap_publish_period_sec = 0.3,
pose_publish_period_sec = 5e-3,
trajectory_publish_period_sec = 30e-3,
rangefinder_sampling_ratio = 1.,
odometry_sampling_ratio = 1.,
fixed_frame_pose_sampling_ratio = 1.,
imu_sampling_ratio = 1.,
landmarks_sampling_ratio = 1.,
}
MAP_BUILDER.use_trajectory_builder_2d = true
TRAJECTORY_BUILDER_2D.min_range = 0.12
TRAJECTORY_BUILDER_2D.max_range = 3.5
TRAJECTORY_BUILDER_2D.missing_data_ray_length = 3.0
TRAJECTORY_BUILDER_2D.use_imu_data = false
TRAJECTORY_BUILDER_2D.use_online_correlative_scan_matching = true
TRAJECTORY_BUILDER_2D.motion_filter.max_angle_radians = math.rad(0.1)
POSE_GRAPH.constraint_builder.min_score = 0.65
POSE_GRAPH.constraint_builder.global_localization_min_score = 0.7
-- POSE_GRAPH.optimize_every_n_nodes = 0
return options
cartographer.launch.py
import os
from launch import LaunchDescription
from ament_index_python.packages import get_package_share_directory
from launch_ros.actions import Node
def generate_launch_description():
cartographer_config_dir = os.path.join(get_package_share_directory('project_mapping'), 'config')
configuration_basename = 'cartographer.lua'
return LaunchDescription([
Node(
package='cartographer_ros',
executable='cartographer_node',
name='cartographer_node',
output='screen',
parameters=[{'use_sim_time': True}],
arguments=['-configuration_directory', cartographer_config_dir,
'-configuration_basename', configuration_basename]),
Node(
package='cartographer_ros',
executable='occupancy_grid_node',
output='screen',
name='occupancy_grid_node',
parameters=[{'use_sim_time': True}],
arguments=['-resolution', '0.05', '-publish_period_sec', '1.0']
),
])
Can anyone try to replicate my errors with the real Turtlebot, please?