Hi everyone,
i am facing a problem in the Real robot project of the course (ROS2 Navigation in 5 days)
in chapter 2 localization part 5 we should do the following :
Create a service that saves these spots into a file.
In the previous section, you created a file with the coordinates of the 3 spots. But, the whole process was too cumbersome, don’t you think? Why don’t we create a ROS Service that does the work for us? Sounds like a good idea, right? Then, let’s do it!
So, now you’ll create a program that will do the following:
- It will launch a node named spot_recorder.
- This node will contain a service server named /save_spot that will take a string as input
- When this service is called, it will store the current coordinates of the robot (position and orientation values) with a label that will be the string provided on the service.
- When the end string is provided in the service call, the node will write all of the values stored into a file named spots.txt.
- Finally, the service will return a message indicating if the file has been saved correctly.
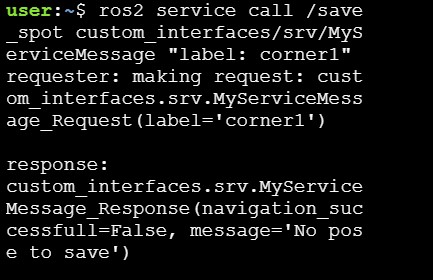
My problem is that when i call the service to save the point it respond with false :
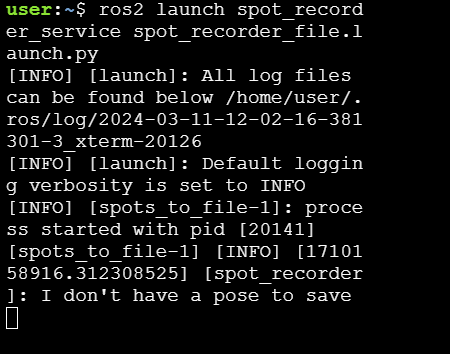
this is my launch file:
this is the service when it is called :
this is my code :
from custom_interfaces.srv import MyServiceMessage
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import PoseWithCovarianceStamped
class Service(Node):
def __init__(self):
super().__init__('spot_recorder')
self.service = self.create_service(MyServiceMessage, 'save_spot', self.custom_service_callback)
self.subscription = self.create_subscription(
PoseWithCovarianceStamped,
'amcl_pose',
self.listener_callback,
10)
self.robot_pose = PoseWithCovarianceStamped()
self.pose_received = False
self.text_to_save = str()
def listener_callback(self, msg):
self.robot_pose = msg.pose.pose
self.pose_received = True
self.get_logger().info(f'I heard: x={self.robot_pose.position.x}, y={self.robot_pose.position.y}')
def custom_service_callback(self, request, response):
if not self.pose_received:
self.get_logger().info('I don\'t have a pose to save')
response.navigation_successfull = False
response.message = 'No pose to save'
return response
if request.label == 'end':
file_path = '/home/user/ros2_ws/src/spot_recorder_service/config/spots.txt'
try:
with open(file_path, 'w') as file:
file.write(self.text_to_save)
response.navigation_successfull = True
response.message = 'File saved successfully'
except Exception as e:
response.navigation_successfull = False
response.message = f'Failed to save file: {e}'
else:
self.text_to_save += f'Label: {request.label}\n'
self.text_to_save += 'Position:\n'
self.text_to_save += f'- x: {self.robot_pose.position.x}\n'
self.text_to_save += f'- y: {self.robot_pose.position.y}\n'
self.text_to_save += f'- z: {self.robot_pose.position.z}\n'
self.text_to_save += 'Orientation:\n'
self.text_to_save += f'- x: {self.robot_pose.orientation.x}\n'
self.text_to_save += f'- y: {self.robot_pose.orientation.y}\n'
self.text_to_save += f'- z: {self.robot_pose.orientation.z}\n'
self.text_to_save += f'- w: {self.robot_pose.orientation.w}\n\n'
response.navigation_successfull = True
response.message = 'Spot added'
self.get_logger().info('Spot added')
return response
def main(args=None):
rclpy.init(args=args)
service = Service()
rclpy.spin(service)
service.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
I hope anyone can help me in my issue or tell me why it responds with False
Thank you
Ghassan