Hi, i know it is not the goal of the quiz to do a perfect square, however i wondered how to do it.
First, I use a simple control loop to achieve the rotation and the advance goals, like following
- Get the pose and the orientation from the odometry
- Calculate the error between the target and the current pose.
- Send a command of velocity (cmd_vel) proportional to this error vel = kp * err
The problem appers when the robot advance fordward, i have the following question:
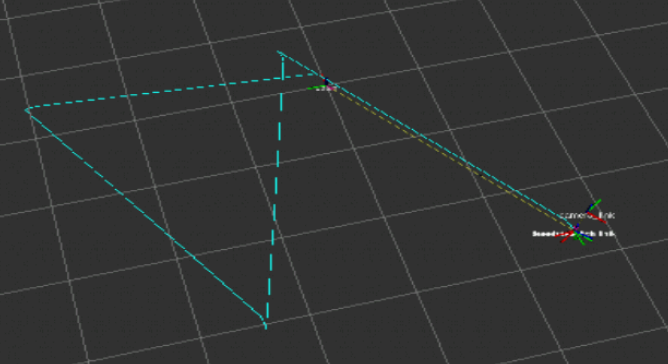
In which frame are send the commands when we use Twist?. Because i use Rviz to show the path that the robot follow and in any moment the movement with twist.linear.x follow any x axes of any frame.