Hello, I’m building my first mobile robot with raspberry pi in the hopes of solidifying my understanding with ROS2 and some packages, but also trying to lower the barrier of setting up a low cost slam robot.
I’ve gotten the RPlidar A1 to run on it and publishing laser scan just fine at 7 Hz.
I have a TF ros2 run tf2_ros static_transform_publisher 0 0 0 0 0 0 base_link laser
and I launched the slam_toolbox with ros2 run slam_toolbox async_slam_toolbox_node --ros-args --params-file ~/Desktop/my_custom_config.yaml
Below is my configuration:
slam_toolbox:
ros__parameters:
use_sim_time: false
update_rate: 1.0
publish_period: 0.1
resolution: 0.05
max_laser_range: 8.0
scan_topic: /scan
odom_frame: base_link # since you don't have odometry, the map can be used as an odom frame
base_frame: base_link
mode: mapping
map_update_interval: 5.0 # 8.0
max_occupied_threshold: 0.65
min_free_threshold: 0.196
minimum_time_interval: 0.5
transform_publish_period: 0.02
linear_update: 0.1 # 0.5
angular_update: 0.1 #0.436
scan_buffer_size: 10
scan_buffer_maximum_scan_distance: 8.0
lookup_transform_timeout_sec: 0.5
submap:
number_of_cells: 3500
I’m only getting an initial map when I run the slam_toolbox… after that the /map topic is showing the same data and /map_updates isn’t publishing anything…
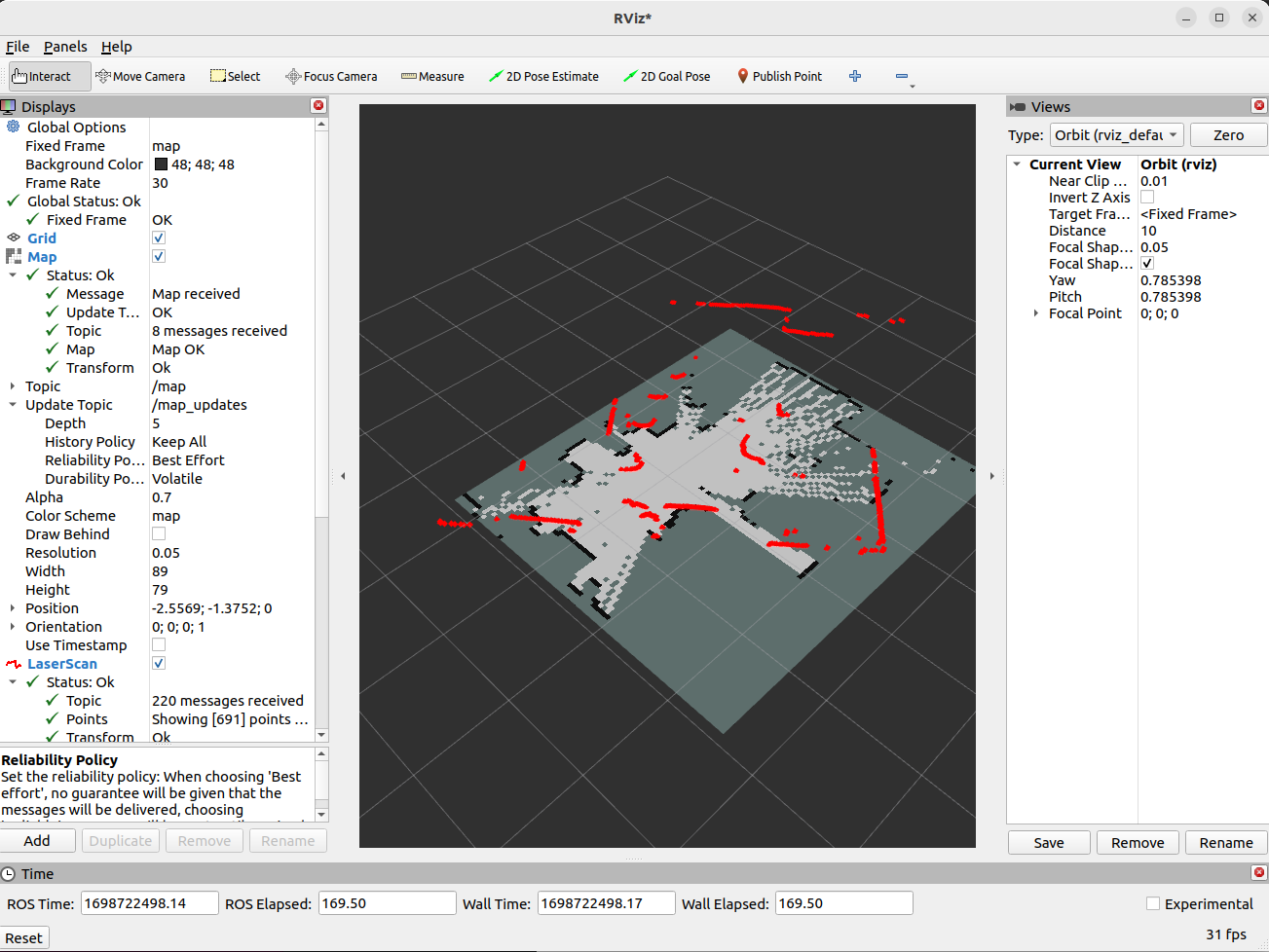
I don’t have other forms of odometry, I thought slam_toolbox would know to utilize laser scan as lidar odometry when setting my odom_frame to base_link in the configuration?