Hi, I’ve tried numerous ways of getting this project to work myself and in the end up I have copied the examples exactly and still can’t seem to get it to work? The first problem is even though it detects a crash it continues to keep moving against the same wall? I think this is due to the following piece of code at the end of the publisher:
while not ctrl_c:
cmd_publisher_object.move_robot(direction = ‘forwards’)
Will this code not just continuously command the robot to move forward, irrespective of the server commands after a collision?
Secondly, to try and run it from the main program, including using Step 5 to create a common package, it still doesn’t recognise the common_pkg as shown in this screenshot:
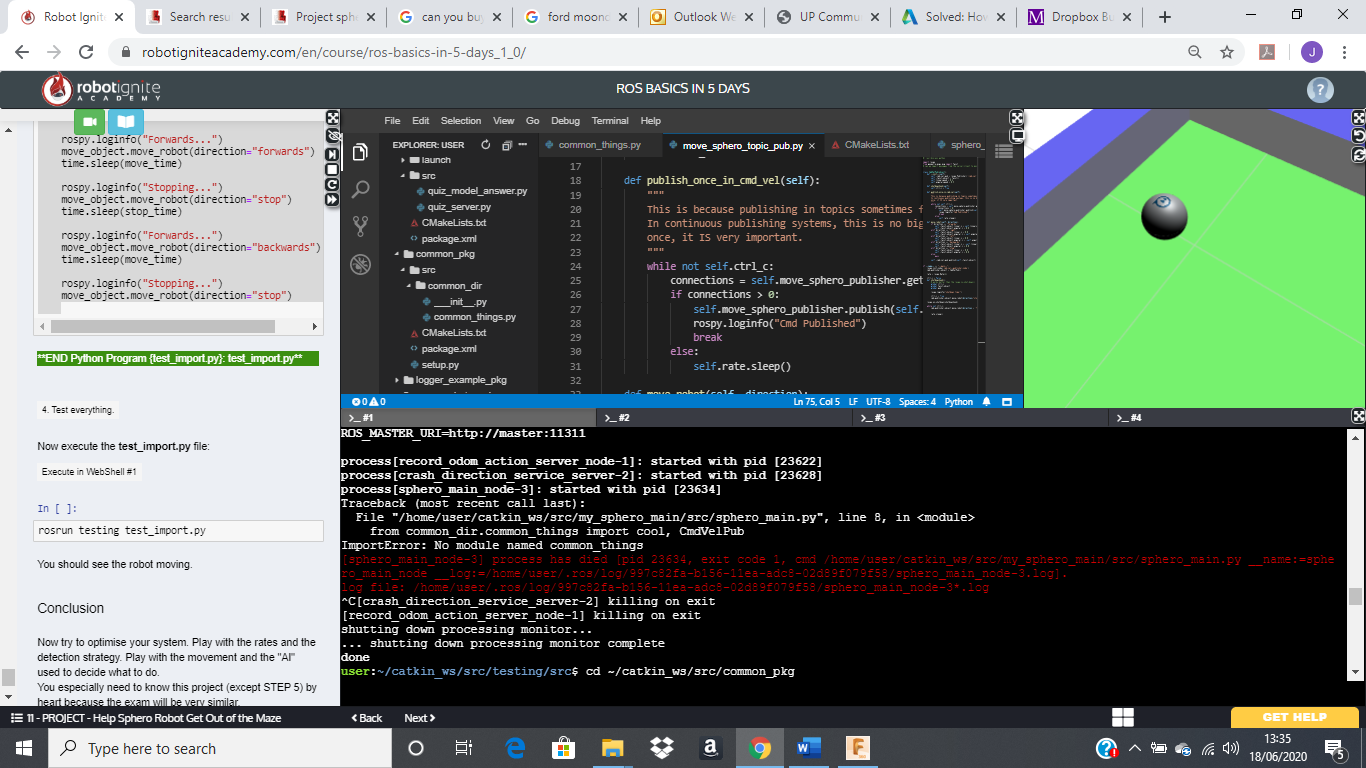
It would not recognise my topic publisher and that’s why I completed Step 5, should there not be something inside the init.py script to link all the modules from different packages so that they can be ran by the main package? Following the example there is nothing here but I was wondering if listing all the packages/modules inside this script may help?
I have already ensured all my files are executable and I’ve ran catkin_make etc. numerous times.
Thanks in advance.
