The broadcaster publishes this new /fixed_carrot frame referred to the /turtle1 frame. It has the same orientation, but it’s translated 2 meters into the Y-AXIS of the /turtle1 axis.
I am trying to do this problem but I think I am missing something here as I am unable to move the turtle2. Could you please correct me where am I going wrong?
Hi,
Check that the TF from turtle2 to fixed_carrot exists. Otherwise it won’t get any transform and therefore no publish in cmd_vel or wrong values at least.
You can check:
rosrun tf tf_echo turtle2 fixed_carrot
Also check that you are publishing something in the topic for the turtle_2:
rostopic echo /turtle2/cmd_vel
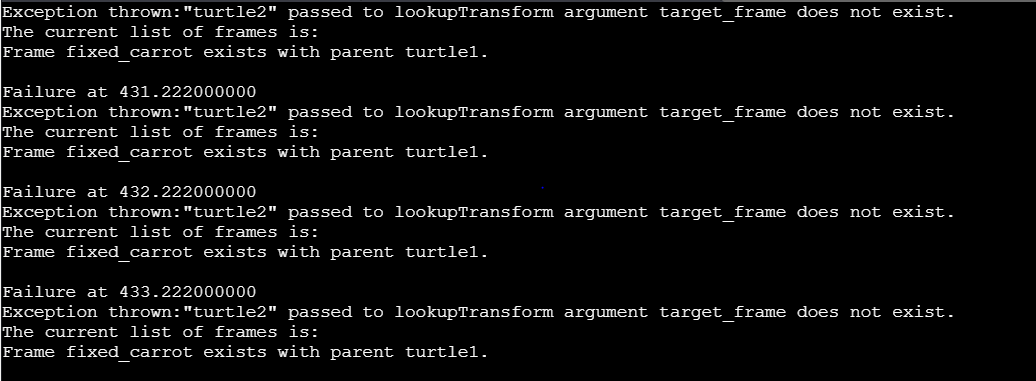
For rosrun tf tf_echo turtle2 fixed_carrot I get this:
And no it is not publishing anything for turtle_2. Please help.
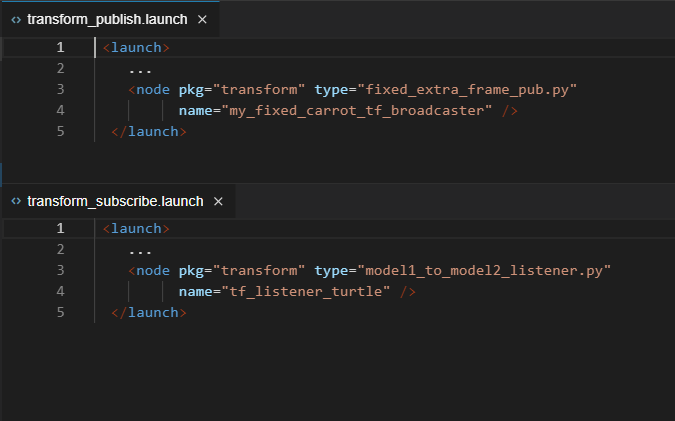
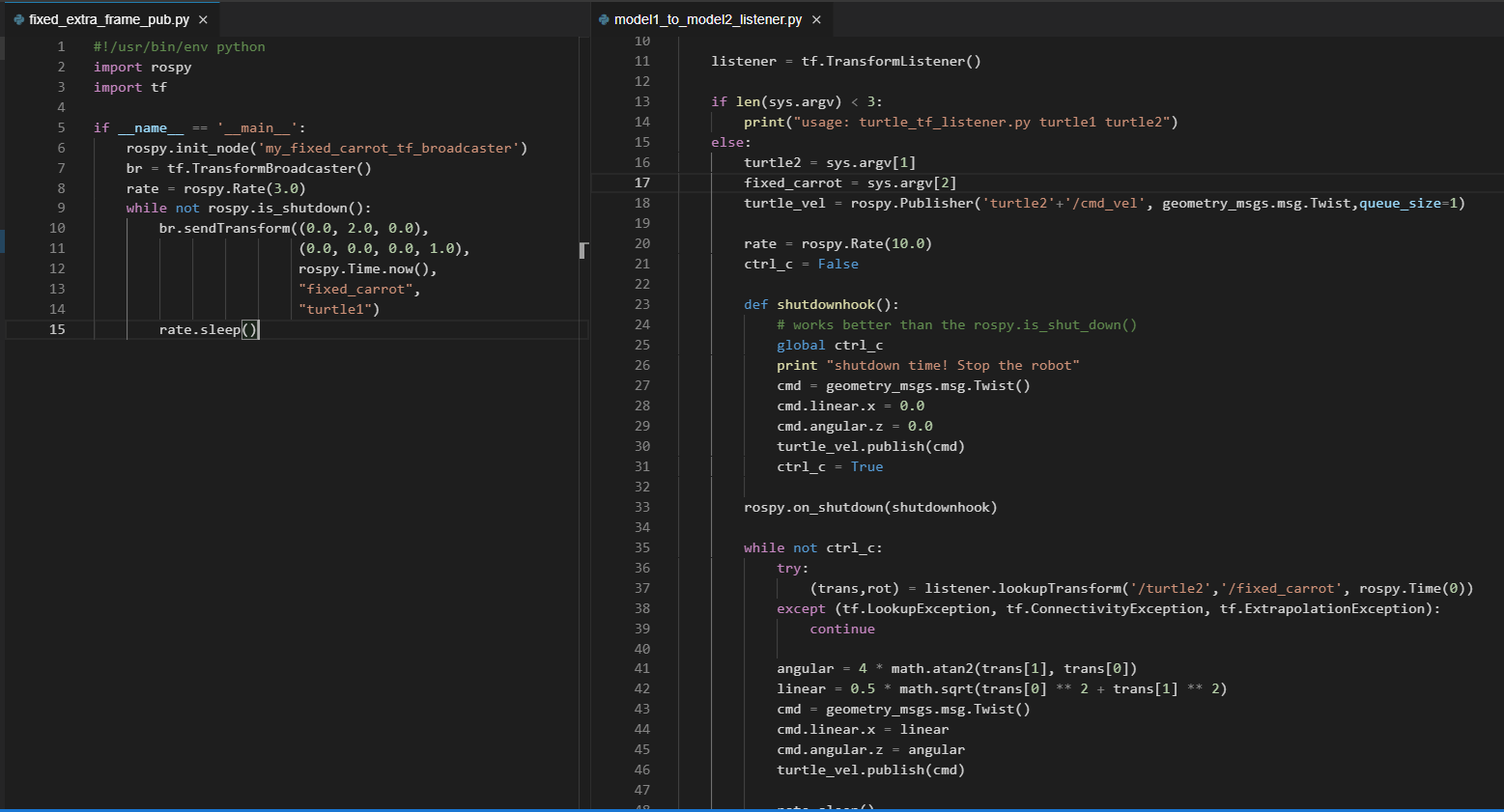
And these are the launch files. I dont understand what is wrong with my code.
The error seems to be in the model1_to_model2_listener.py You are listening to tf of turtle2 to fixed_carrot, but thepublisher is publishing the tf of the turtle1 to fixed carrot.