The behavior tree XML file generated by the software Groot is not compatible with the NAV2 package. However, the software Groot is officially suggested by NAV2’s manual (manual).
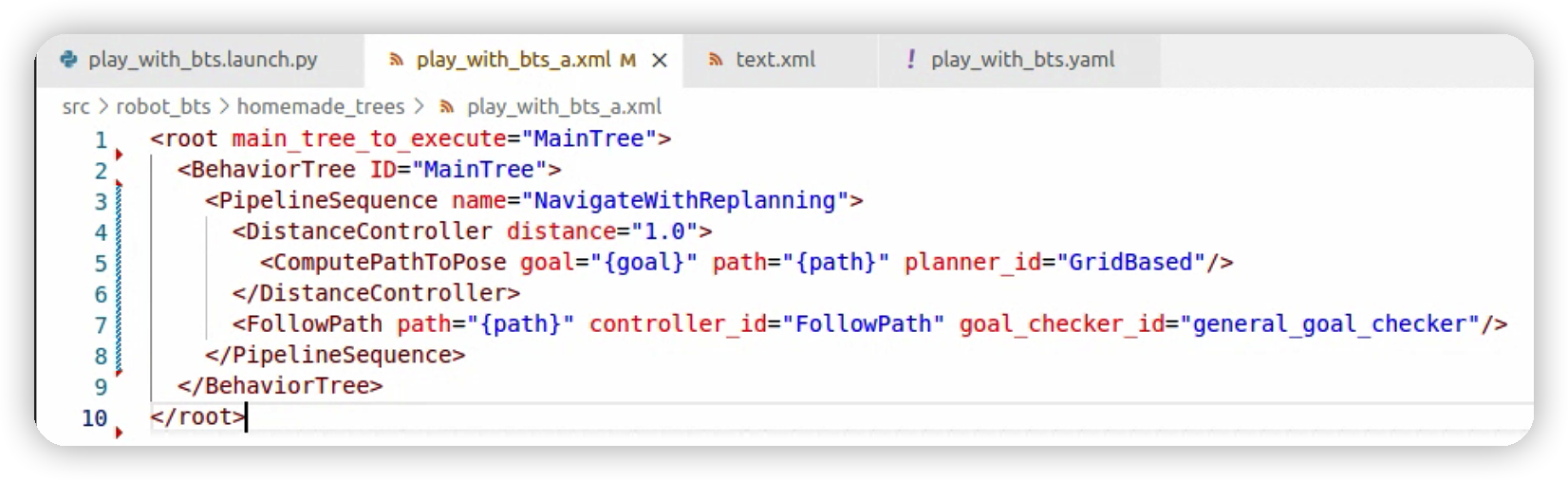

The difference lies in the completely different understanding of behavior trees. The author of the Groot considers that the nodes only contain control nodes and execution (action) nodes; however, the designer of the NAV2 believes that the node can be homemade.
1 Like
Hi @bluebird! Which course has information about behaviour trees? Thanks in advance!
The behavior trees are used in the ROS2 Navigation system. You can check how they are used in the ROS2 Navigation (Galactic) course. However, in that course, you are only learning how to use already existing behaviors.
We have prepared a second course about ROS2 Navigation Advanced subjects which explains how to build your own Behavior Trees for navigation and how to use Groot (among other things like how to create plugins for navigation, or waypoints, or forbidden zones, etc). This advanced course will be published on the 25th July 2022.
That’s amazing!!! Thanks @rtellez!!! I’m looking forward to doing it!! thanks!
1 Like
Hi @rtellez!!
Is the second course about ROS2 Navigation advanced subjects going to be publish soon?
Thanks again!
This topic was automatically closed after 45 hours. New replies are no longer allowed.