Hi,
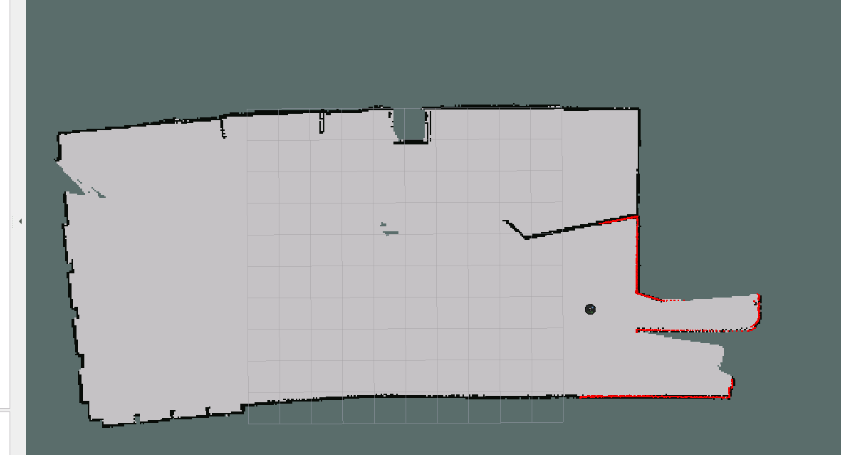
After I scan a map, I see the scanned map does not look like the real map. It is quite bended
It is not good, right?
How to fix it?
And in reality, how can we scan a map properly?
Thanks
Hi,
After I scan a map, I see the scanned map does not look like the real map. It is quite bended
It is not good, right?
How to fix it?
And in reality, how can we scan a map properly?
Thanks
Hi @NguyenDuyDuc ,
All sensors have errors when they work. Therefore, most scanned maps do not perfectly represent the environments where robots operate.
In my experience, if you want a good map for robots to navigate in the future, this solution might help:
.pgm file using an image editor app.Regards,
Tung Ngo
It is not good, right?
No, the map should have at least the shape of the real environment. It doesn’t have to be perfect but this wouldn’t be acceptable for good navigation.
How to fix it?
There are various ways depending on the reason why it happened in the first place. This tends to happen when:
And in reality, how can we scan a map properly?
Mapping is an art in itself. But the best practices are:
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.