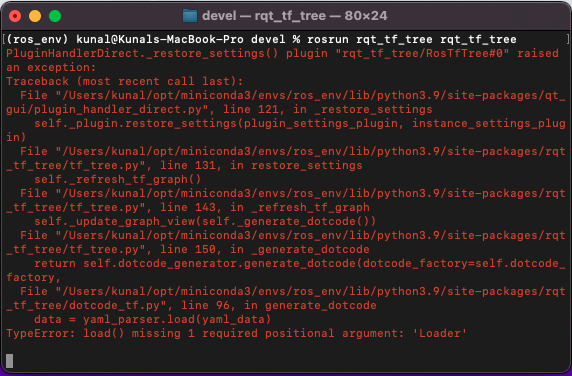
I am trying to run astar algorithm from the construct in my local machine and I am getting this error.
I am running robostack on mac. I am getting this error when I run:
roslaunch unit3 unit3_astar_solution.launch
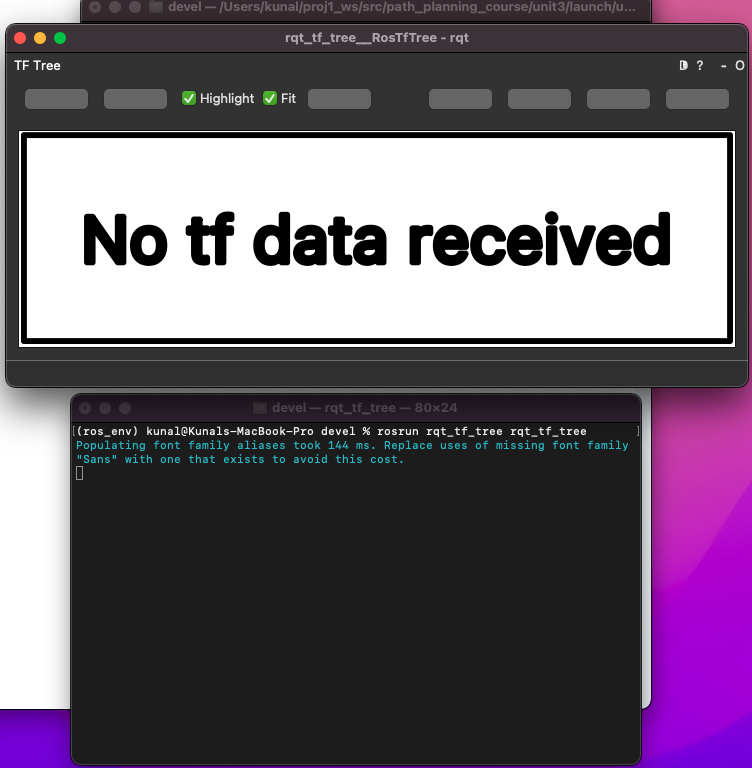
[ WARN] [1663193403.400585000]: Timed out waiting for transform from base_footprint to map to become available before running costmap, tf error: canTransform: target_frame map does not exist. canTransform: source_frame base_footprint does not exist… canTransform returned after 0.101095 timeout was 0.1.
Have you launched the full navigation system before launching the astar thing? It looks like you don’t have map server and localization running. That is why there is no map frame.
By the way, developing with ROS in a Mac is a bad idea… you are adding a lot of additional errors. Do it only if you don’t have the chance.