Tested using joystick and teleop_twist_keyboard.
My apologies. Let me check that and come back to you.
Hi @soren.rusbjerg
We are now working on replacing the problematic robot and will keep you posted.
1 Like
Could the user have a way to reboot the robot when it is not working?
No, there’s no way for the user to reboot it. We are working towards a sustainable fix.
Same issue, does not move from the joystick, does not move from the code or from teleop. i had my presentation today but i think this is the reason they canceled it for now. just for backup i had a video of my testing on it when it was working a few days ago.
Yes the robot is not working. We are at present replacing it by a new one. It will be ready along today. We’ll keep you nformed
Alright, thanks for the update
@soren.rusbjerg @aj154
A new robot is now available. You’ll find it in a “SmallCity” lab.
thanks will test it toon
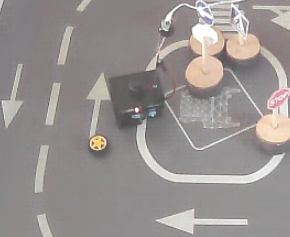
Hi, I’ve tried using the SmallCity robot but i am not getting a response while trying to move with the joystick.

Also, by looking at the screenshot, I believe there’s a detached wheel.
Thanks
Just an update… i can now move the robot - no issues with connectivity/communication… but the detached wheel is still a problem.
Working on it right now
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.