In C++ basics course, micro project( solution provided by course below), we are asked to escape a cafe using laser reading and /cmd topic.
#include "rosbot_control/rosbot_class.h"
#include <ros/ros.h>
#include <math.h>
#include <string>
using namespace std;
class RosbotMove {
public:
RosbotClass rosbot;
void get_out();
float calc_distance(float x_0, float y_0, float x_1, float y_1);
};
void RosbotMove::get_out() {
// ROS_INFO_STREAM(rosbot.get_laser(0));
rosbot.move_forward(1);
while (rosbot.get_laser(0) > 1.75) {
ROS_INFO_STREAM("Laser frontal reading: " << rosbot.get_laser(0));
rosbot.move_forward(1);
}
rosbot.turn("clockwise", 3);
rosbot.move_forward(2);
rosbot.turn("counterclockwise", 3);
// Get initial position
float x_0 = rosbot.get_position(1);
float y_0 = rosbot.get_position(2);
float x_1 = x_0;
float y_1 = y_0;
float dist = calc_distance(x_0, y_0, x_1, y_1);
while (dist < 8.00) {
// Update current position
x_1 = rosbot.get_position(1);
y_1 = rosbot.get_position(2);
dist = calc_distance(x_0, y_0, x_1, y_1);
ROS_INFO_STREAM("Distance travelled: " << dist);
// Keep moving
rosbot.move_forward(1);
}
rosbot.turn("clockwise", 3);
rosbot.move_forward(5);
ROS_INFO_STREAM("Success!!!");
}
float RosbotMove::calc_distance(float x_0, float y_0, float x_1, float y_1) {
return sqrt(pow((x_0 - x_1), 2) + pow((x_0 - x_1), 2));
}
int main(int argc, char **argv) {
ros::init(argc, argv, "Rosbot_move_node");
RosbotMove rosbot_moves;
rosbot_moves.get_out();
}
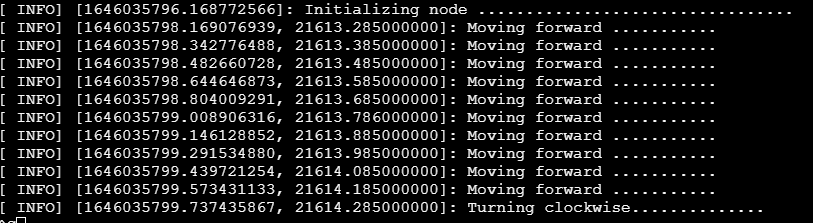
Now, even though we have the line ROS_INFO_STREAM("Laser frontal reading: " << rosbot.get_laser(0));, no data is published into the shell. As you can see here, we are not seeing any output of the line: ROS_INFO_STREAM("Laser frontal reading: " << rosbot.get_laser(0));
If i try to access the laser reading using ROS_INFO_STREAM(rosbot.get_laser(0));, the program crahes saying
