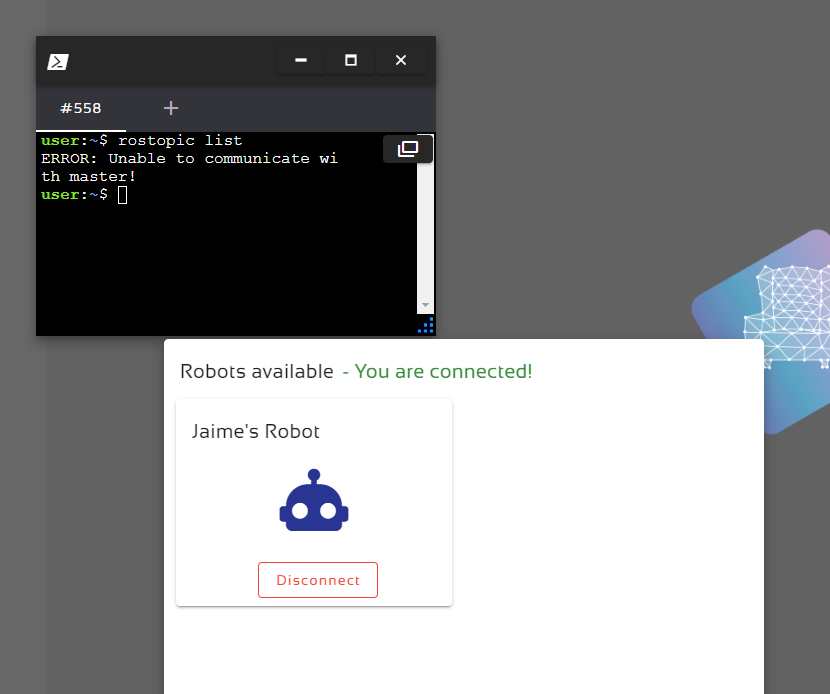
I have run and followed the instructions to connect a real robot to my rosject and everything was looking good. I can run roscore in my robot, and it seems like it is connected to my rosject (see image below). Unfortunately, when I try to run “rostopic list” in my rosject’s terminal I get the following message: “ERROR: Unable to communicate twith master!” so I cannot run any command.
Below I have also included the last lines of my /etc/hosts and .bashrc files: .bashrc
export ROS_IPV6=on
export ROS_MASTER_URI=http://husarnet-local:11311
export ROS_HOSTNAME=husarnet-local
export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
export CYCLONEDDS_URI=file:///var/lib/theconstruct.rrl/cyclonedds.xml
export FASTRTPS_DEFAULT_PROFILES_FILE=/var/lib/theconstruct.rrl/fastdds_husarnet.xml
Yes, as you said, i changed the file manually. This is because with the initial configuration (the one you said) I wasn’t even able to run roscore in my robot. I have done what you said and I got the same result, my files now look like this: .bashrc
export ROS_IPV6=on
export ROS_MASTER_URI=http://master:11311
export ROS_HOSTNAME=master
export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp
export CYCLONEDDS_URI=file:///var/lib/theconstruct.rrl/cyclonedds.xml
export FASTRTPS_DEFAULT_PROFILES_FILE=/var/lib/theconstruct.rrl/fastdds_husarnet.xml
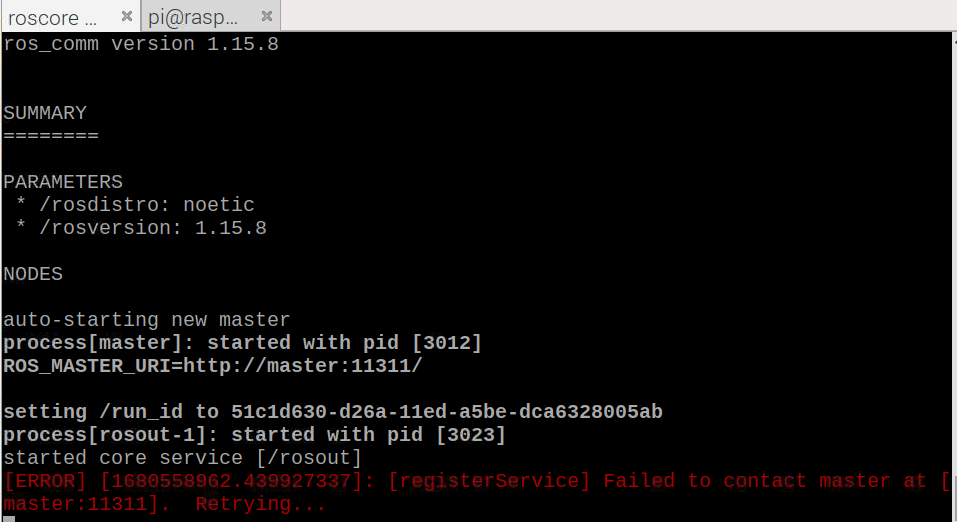
if a change in /etc/hosts fc94:c41e:b11d:8728:a03f:1a9d:54f5:4883 husarnet-local # managed by Husarnet to fc94:c41e:b11d:8728:a03f:1a9d:54f5:4883 master # managed by Husarnet i can run roscore but i am still not able to get communication to master from my rosject webshell.
Hope you can help me, if I have to change any configuration file to test if this works, please tell me.
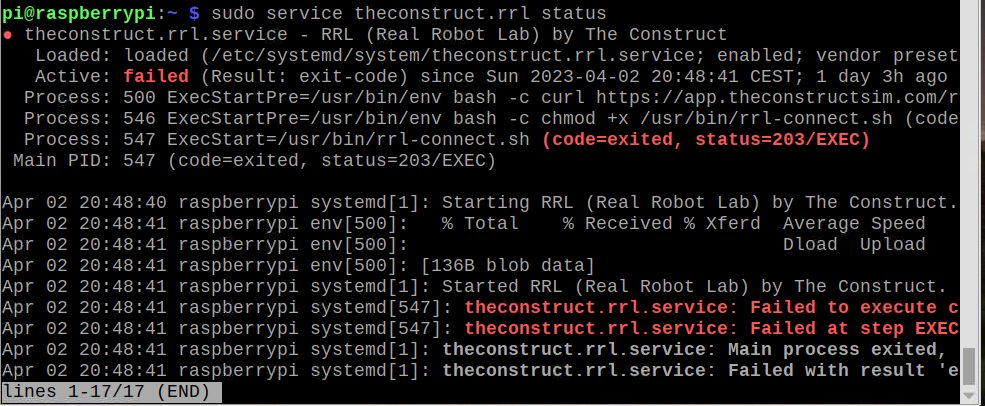
Like Rodrigo said, if you paste the whole output of sudo service theconstruct.rrl status, it would be easier for us to diagnose.
I would also ask you to post the output of sudo service husarnet status
These are some of the instructions we see when installing the service:
🐞️ What to do if you cannot connect to your robot from https://app.theconstructsim.com:
1 - Check the logs with:
sudo journalctl -f -u theconstruct.rrl
2 - You can also check the service status with:
sudo service theconstruct.rrl status
3 - Or restart the service with:
sudo service theconstruct.rrl restart
If you still cannot connect to your robot, please contact us through info@theconstructsim.com
🔴️️ To remove this service, run:
rrl-uninstall
# You can also check Husarnet:
sudo service husarnet status
So, based on the instructions above, another command that you could try to see more logs is:
sudo journalctl -f -u theconstruct.rrl
Based on your screenshot, I see that you are not connected to Husarnet, because the master host is set automatically by Husarnet.
Please try all the commands I mentioned here, and paste them here so that we can diagnose it better.
Sorry for the delay but I have good news! It looks like is working fine
I have run roscore in my robot without any issue and I have been able to connect to my robot from my rosject. I have run some nodes in my robot and I can see the topics from my rosject.