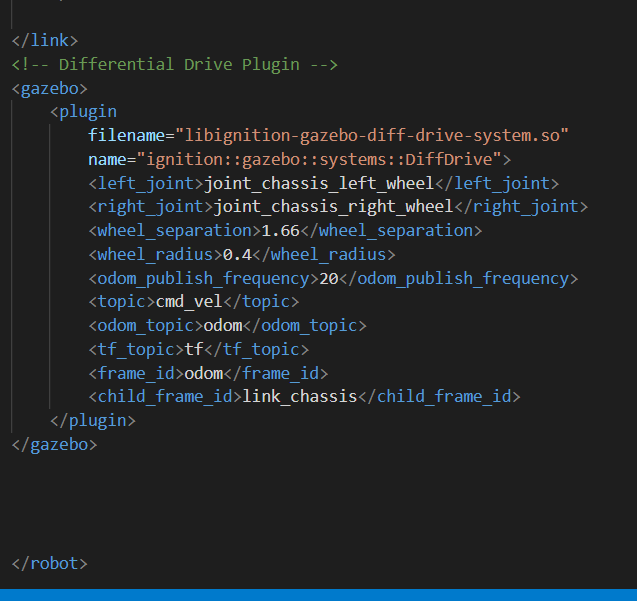
I have installed the diff steer plugin, and followed the actions defined for webshells 1-4. However, the robot does not move with the keyboard input. Are there changes to setup.py or package.xml files that are required? in addtion to the plugin?
Hi @ROxX ,
You need to implement ROS-GZ bridge to enable communication between ROS2 topics and Gazebo Sim topics. Without the bridge implemented, even if you have correctly configured Gazebo plugins, you will not be able to do anything in the simulation with ROS2.
Regards,
Girish