Hi,
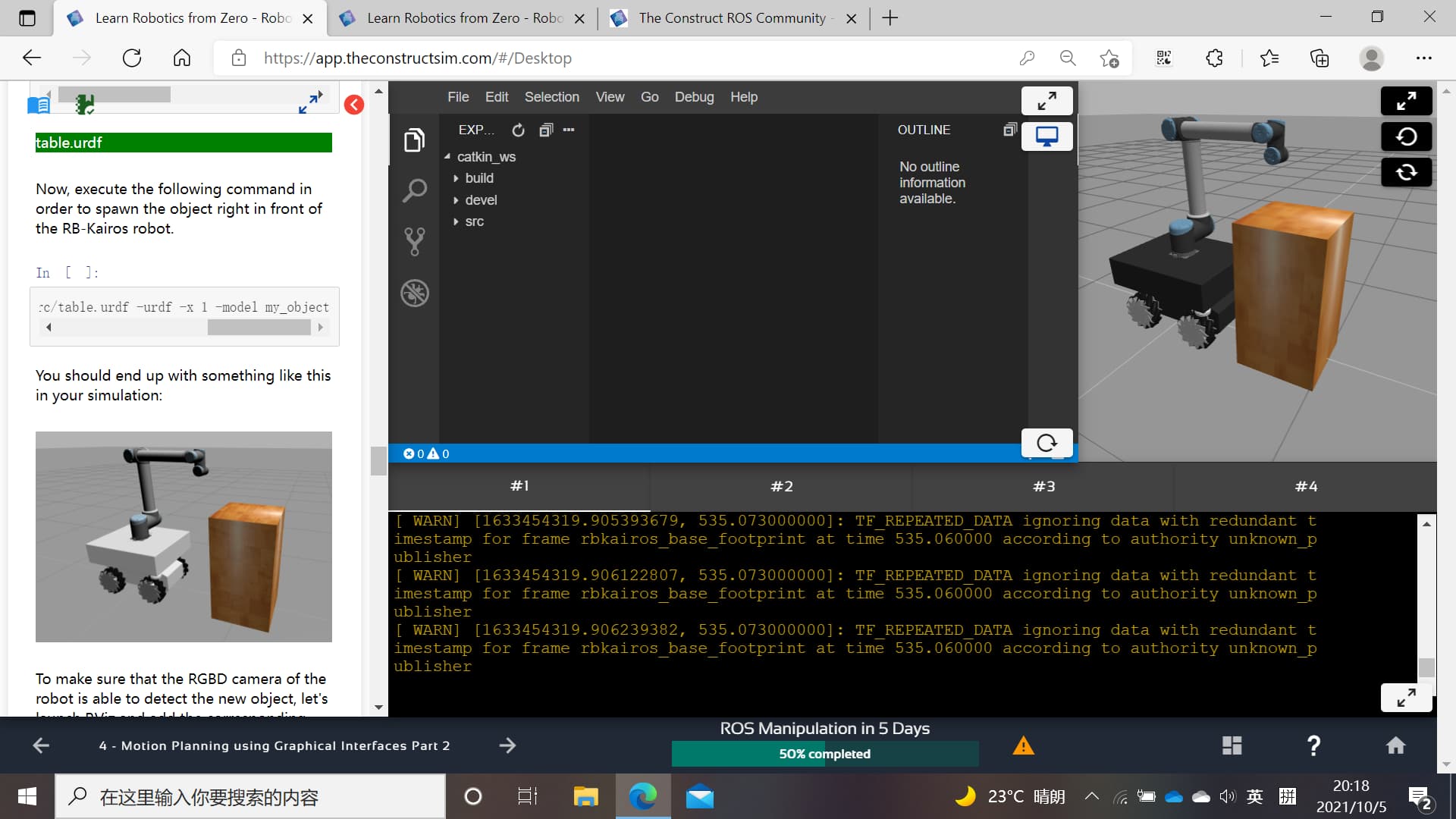
When I follow the exercise 2.3 to 2.5 in this course, after I spawn the object in front of the robot:
After that, I use roslaunch rbkairos_moveit_config rbkairos_planning_execution.launch.
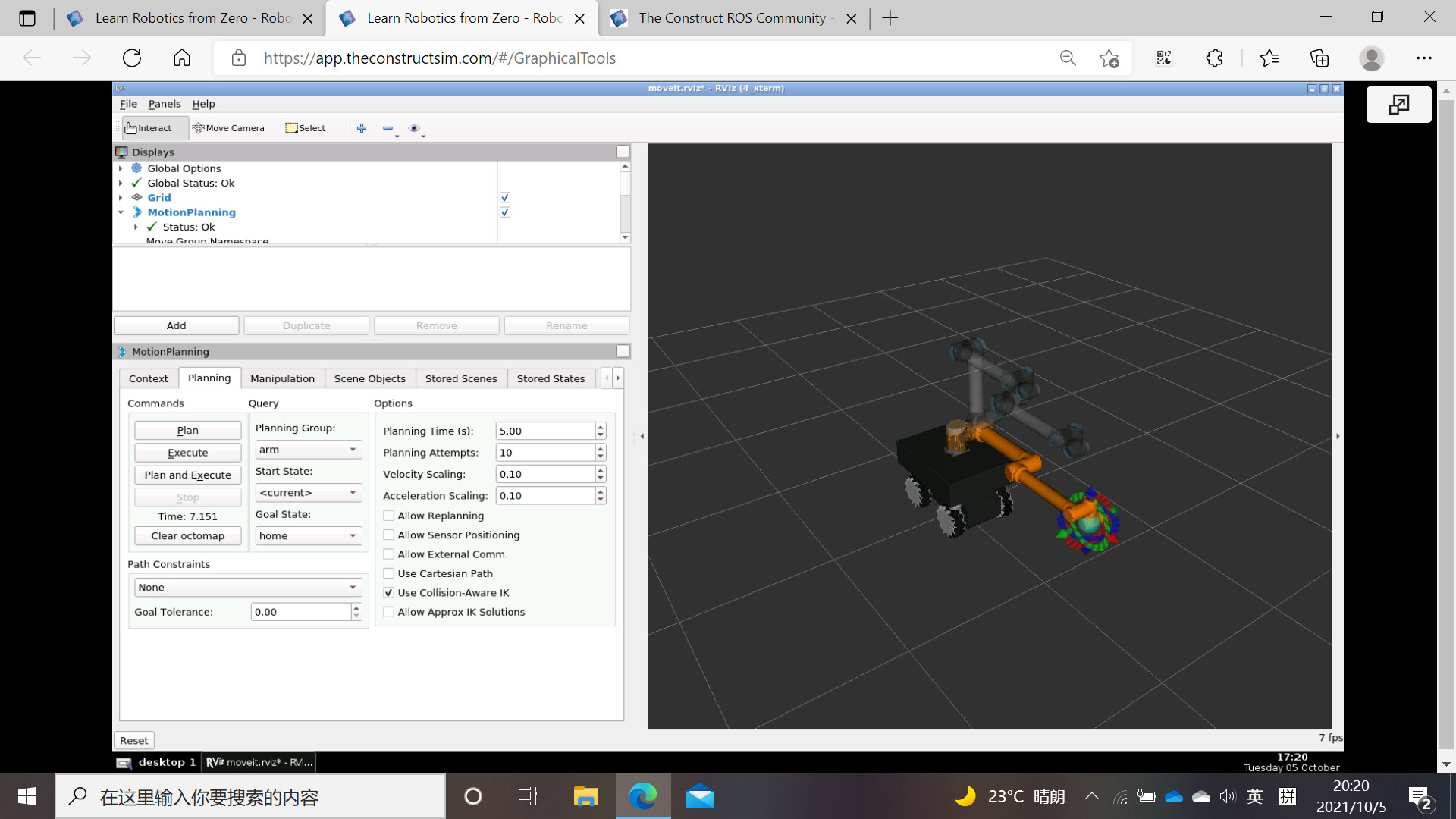
Then, when I try to plan a trajectory to the “home” point, it doesn’t show an error:
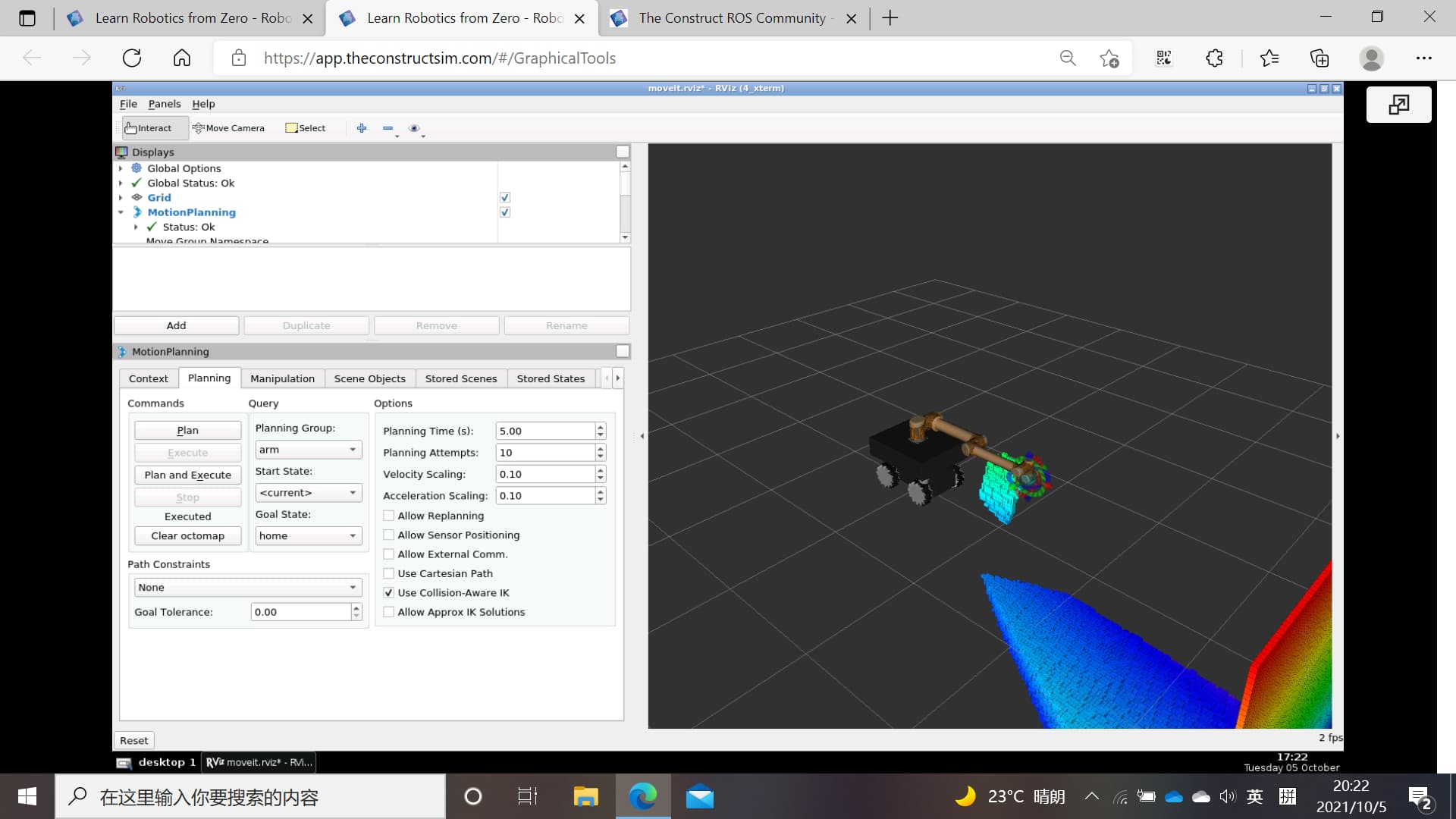
After I just click “execute”, the following is the output:
Why perception doesn’t work? I strictly follow the exercises but can’t find out why.
Thanks!
Hello @chengshuan0000 ,
I think the problem is that the object is too close to the robot. Could you try spawning it a bit further away?
You can remove the spawned object with the command:
rosservice call /gazebo/delete_model "model_name: 'my_object'"
To spawn it further away, you can modify the x value in the spawn command (ie., I increase it here to 1.5, which should work better):
rosrun gazebo_ros spawn_model -file /home/user/catkin_ws/src/table.urdf -urdf -x 1.5 -model my_object
Hope this helps,