I’m in the Navigation Rosject project (ros2). I’m unable to view the tf trees using rqt_tf_tree as the package is not found. I tried installing and sourcing the ros (humble) environment. But no luck.
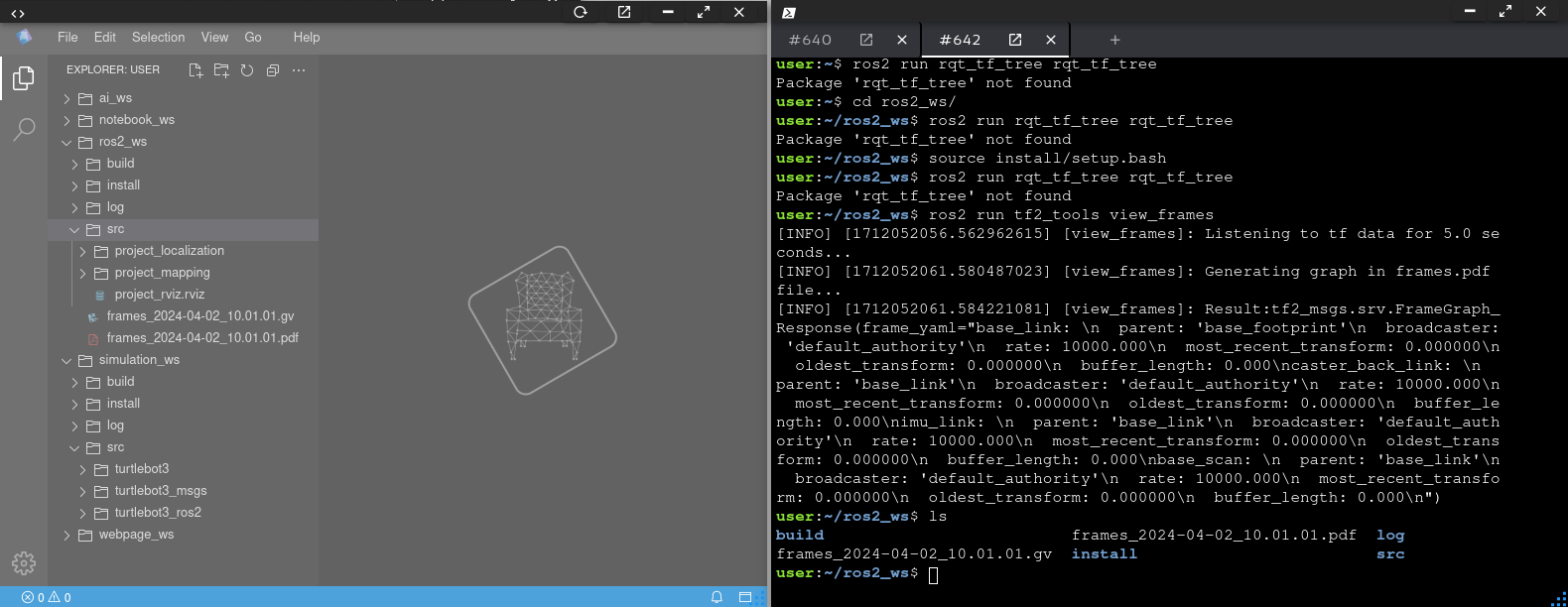
user:~/ros2_ws$ ros2 run rqt_tf_tree rqt_tf_tree Package 'rqt_tf_tree' not found
Can you please send a screenshot of your current directory? As of late, you can try to rebuild the package and see if it is inside your ‘install’ folder.
I think the rosject environment is lacking the installation of rqt_tf_tree package.
Your error clearly explains that when the output says: Package 'xyz' not found.
Run the following commands to install the package:
cd ~
sudo apt update
sudo apt install ros-<distro>-rqt-tf-tree # distro=humble [in your case]
ros-<distro>-rqt-tf-tree depends on ros-<distro>-rqt-gui package to also be installed.
In case rqt_tf_tree does not start, then you may have to install rqt_gui package also.
In that case, also install rqt_gui package:
Yes, you always need to run sudo apt update before installing or removing any on any Linux based distros that use apt as package manager.
If I am right, this is also applicable for other Linux distros that use non-apt package managers such as pacman, dnf, etc. It is just to retrieve an updated list of currently installed and functional packages on the Linux distro.