How do you know the origin for the joints. I am trying to build a new model using the below information
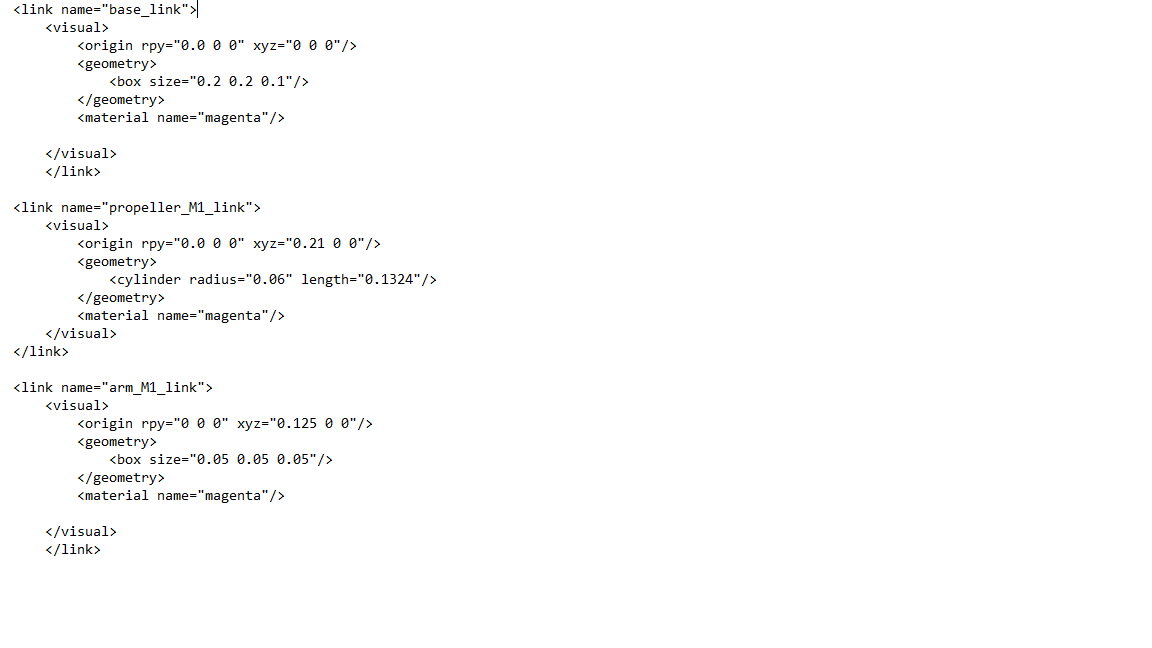
How would I go about making a joint to connect the base to arm and arm to propeller.
How do you know the origin for the joints. I am trying to build a new model using the below information
How would I go about making a joint to connect the base to arm and arm to propeller.
The origin of an object depends on the type:
As for the question you placed here, have you gone through the URDFcourse here in robotigniteaccademy?
In your case if you connect the base_link with the arm_M1_ink, you can do two things:
As you see fit.
Please post here your project if you want us to have a look and maybe help you. Create also a ROSject in ROSDevelopementStudio ROSDS so that you can share your project with the community and we can contribute to your project ;).