Hi !
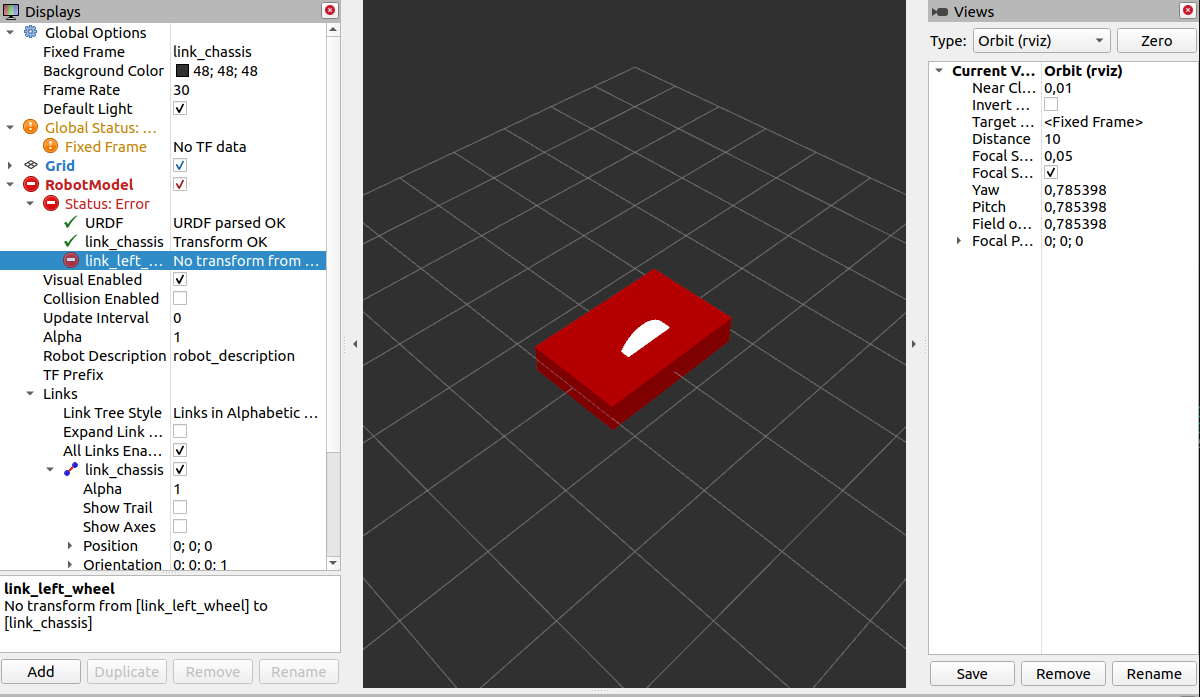
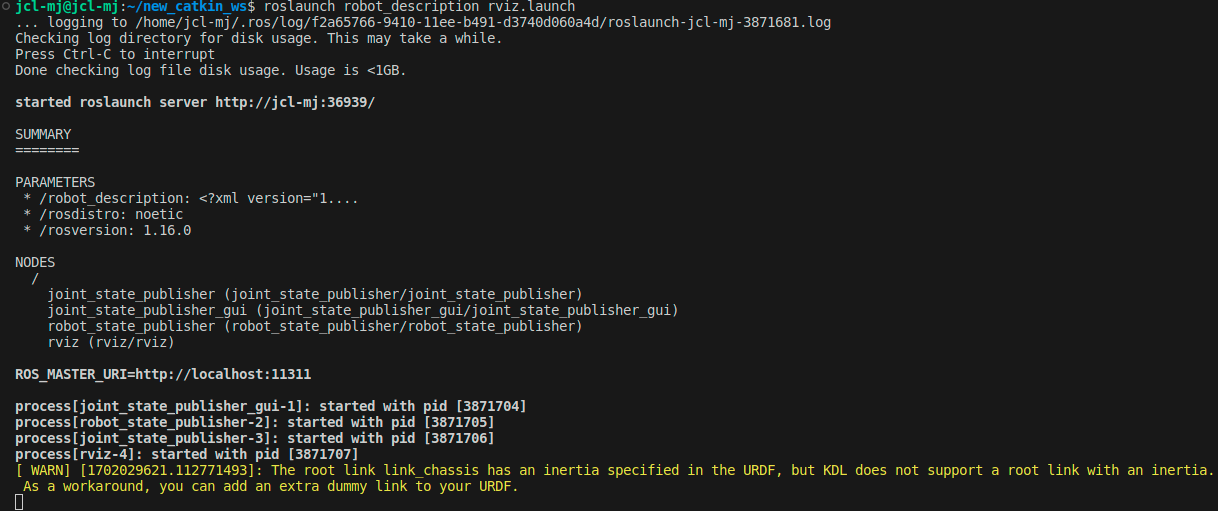
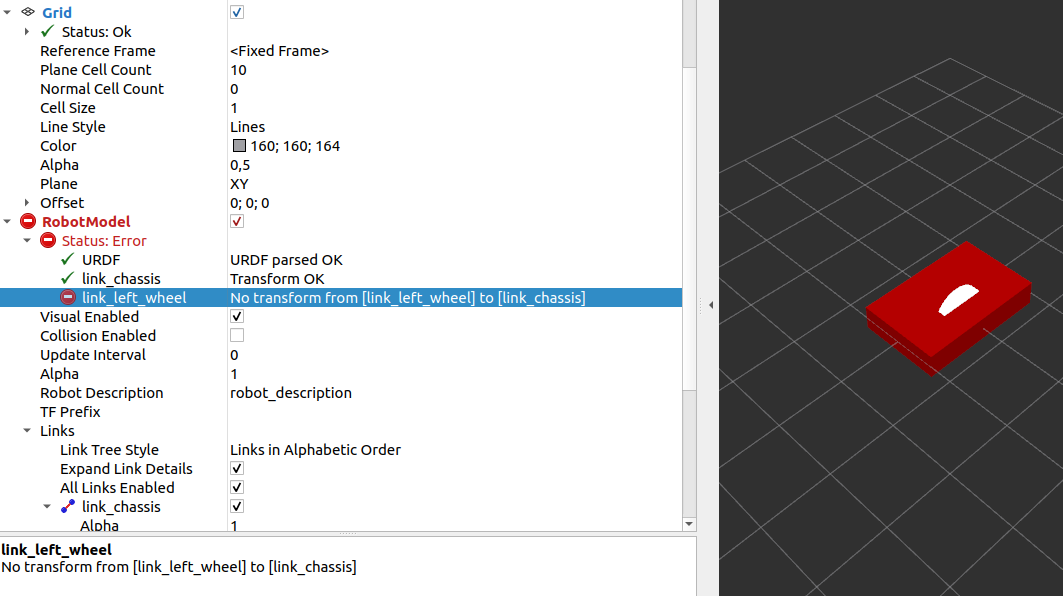
I am on unit 2. I have followed the instruction provided by construct to create the following URDF file. But when i open in RVIZ , it gives an error “No transform from [link_left_wheel] to [link_chassis]” (screenshot attached). Can anyone please guide me , what could be the reason ?
<?xml version="1.0" ?>
<robot name="robot">
<!-- Link - chassis -->
<link name="link_chassis">
<inertial>
<mass value="10" />
<origin xyz="0 0 0.3" rpy="0 0 0" />
<inertia ixx="1.5417" ixy="0" ixz="0" iyy="3.467" iyz="0" izz="4.742" />
</inertial>
<collision>
<geometry>
<box size="2 1.3 0.4" />
</geometry>
</collision>
<visual>
<geometry>
<box size="2 1.3 0.4" />
</geometry>
<material name="Red">
<color rgba="1 0 0 1" />
</material>
</visual>
</link>
<!-- Joint - chassis / left wheel -->
<joint name="joint_chassis_left_wheel" type="continuous">
<origin rpy="0 0 0" xyz="-0.5 0.65 0" />
<child link="link_left_wheel" />
<parent link="link_chassis" />
<axis rpy="0 0 0" xyz="0 1 0" />
<limit effort="10000" velocity="1000" />
<joint_properties damping="1.0" friction="1.0" />
</joint>
<!-- Link - left wheel -->
<link name="link_left_wheel">
<inertial>
<mass value="1" />
<origin xyz="0 0 0" rpy="0 0 0" />
<inertia ixx="0.002526666666667" ixy="0" ixz="0" iyy="0.002526666666667" iyz="0" izz="0.005"/>
</inertial>
<collision>
<origin rpy="1.5707 0 0" xyz="0 0.18 0" />
<geometry>
<cylinder length="0.12" radius="0.4"/>
</geometry>
</collision>
<visual>
<origin rpy="1.5707 0 0" xyz="0 0.18 0" />
<geometry>
<cylinder length="0.12" radius="0.4"/>
</geometry>
</visual>
<collision>
<origin rpy="1.5707 0 0" xyz="0 0.06 0" />
<geometry>
<cylinder length="0.12" radius="0.08"/>
</geometry>
</collision>
<visual>
<origin rpy="1.5707 0 0" xyz="0 0.06 0" />
<geometry>
<cylinder length="0.12" radius="0.08"/>
</geometry>
</visual>
</link>
</robot>
Best regards,
Muhammad