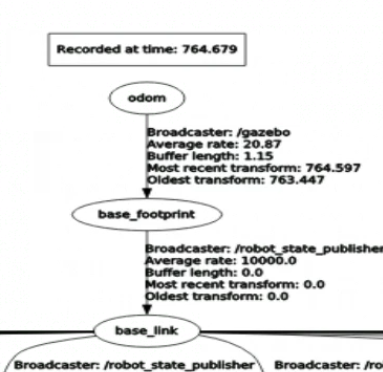
I wonder if the filtered position of robot is w.r.t odom frame? Since I look up the tf tree where the odom frame is the root node and there is no any tf between odom and map frame. But the tutorial mentioned that all the sensor readings are w.r.t map frame. I am confused with this since there is not any tf linked to map frame based on the tf tree shown below. Thanks!