Hi Péter, what do you mean with your comment? I feel like your comment contains an important insight but I cannot grasp it. Can you please clarify for me?
I think, that in past versions we could use the strings “differential” and “omnidirectional” in the config file. (I am not sure)
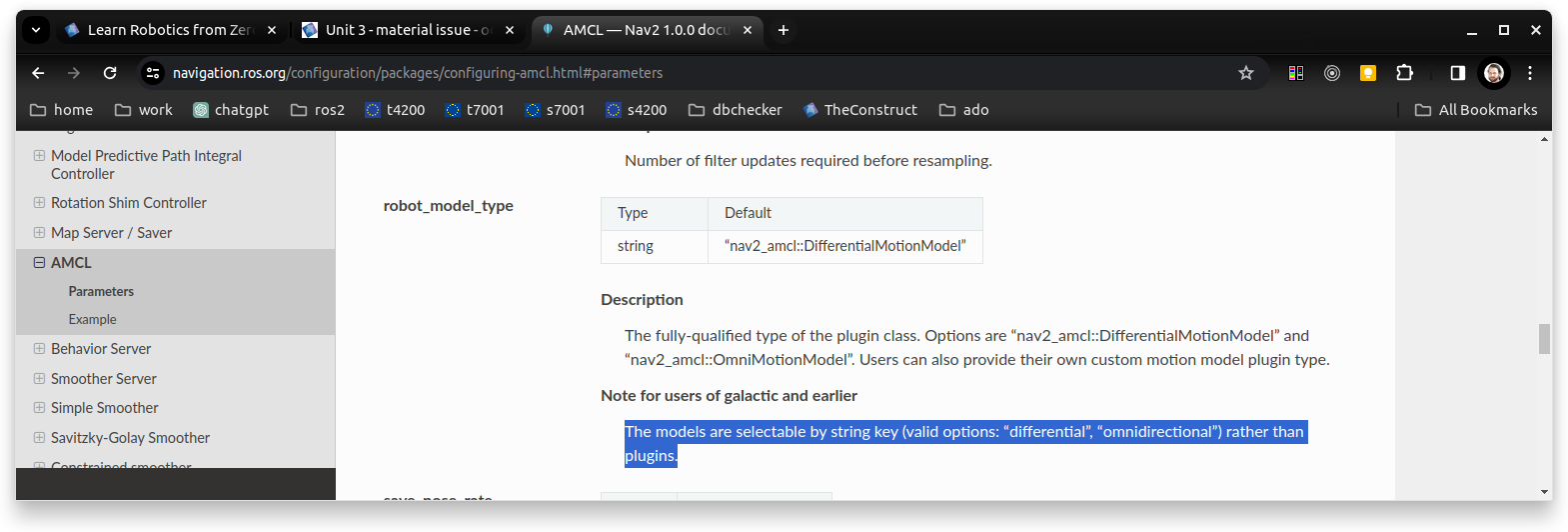
I think, now we can not, but the quoted part suggests this, like: robot_model_type (string, default: “differential”)
So the reader may think, that he/she can use “differential” as a parameter for odometry.
But this is not the case, the string “nav2_amcl::DifferentialMotionModel” can be used but not “differential”.
Hope, it is clear. I am pretty sure, that the quoted text is from an older version of the nav2 documentation. Recent version is like this: