Hi,
I just tested your code, the first one you placed in this issue and it works.
The only thing is that you have to launch in a second terminal the ![]()
ros2 run joint_state_publisher_gui joint_state_publisher_gui
The reason is what we explained in the course that the joints that are NOT fixed, because their transform depends on the value of the angle of the joint that moves them, until the system has a value of that joint, NO transform will be published, because its impossible to generate a TF without knowing that.
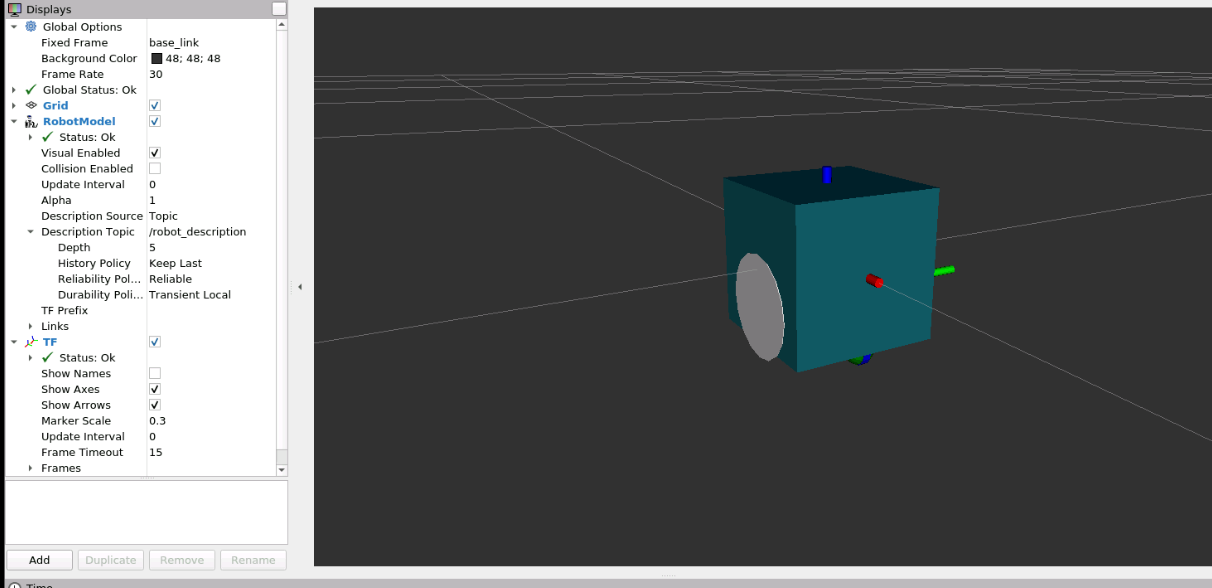
So when you launch the rviz, we are only publishing the robot description with the robot_state publisher and opening RVIZ2. You need something that publishes at least fake values of those joints to trigger the publishing of the TFs of all the links connected to mobile joints (non-fixed joints ).
When you start the simulation in the gazebo this will not be necessary because you have controllers that publish the values of those joints, the real values.
I hope this clears things up ![]()