Hello,
I am trying to do the unitl 6 and the robot in gazebo simulation doesn’t move. I don’t get any errors. I have commented out the line in trajectory_execution.launch.xml as explained in the guide.
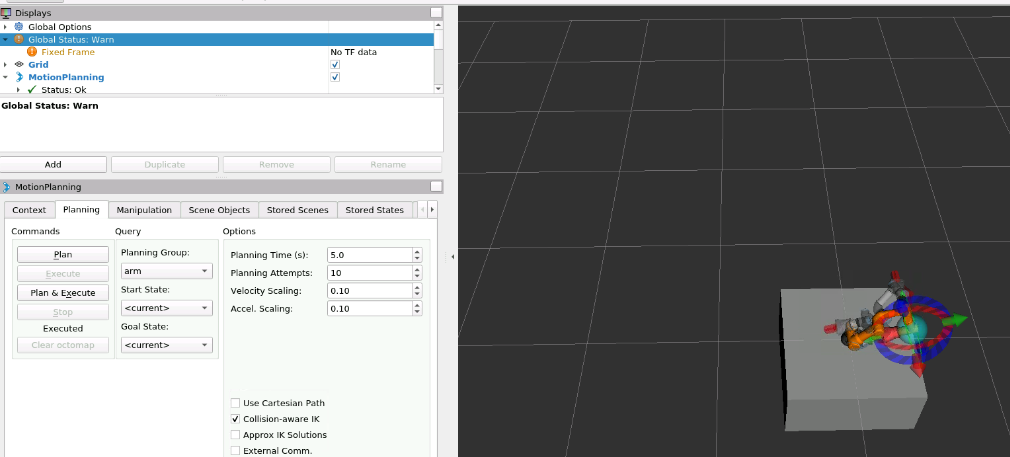
In RVIZ the plan and the execution succeed:
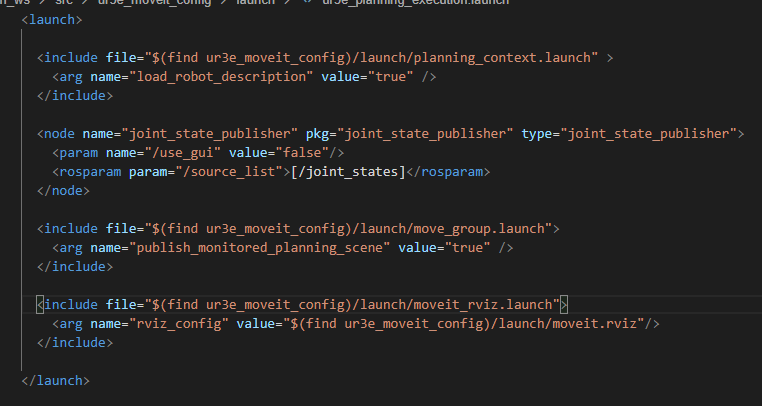
This is my launch file:
and this my ros_contoller.yaml:
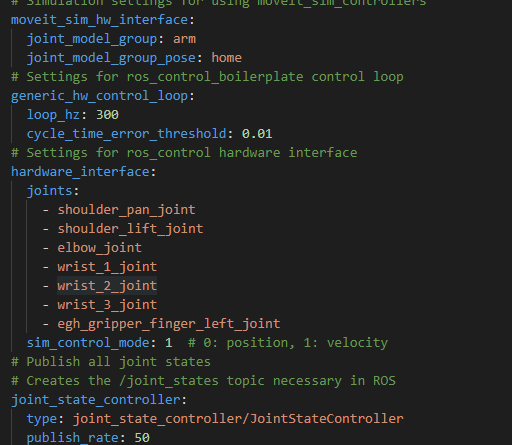
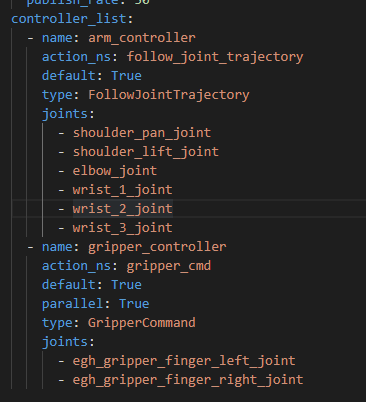
Could you help me? I have another question as well. Even if I added both the end-effector joints in the moveit_setup_assistant, in the harderware_inteface only one of them appears. Should I add the other one manually?
Thank you.