Hello!
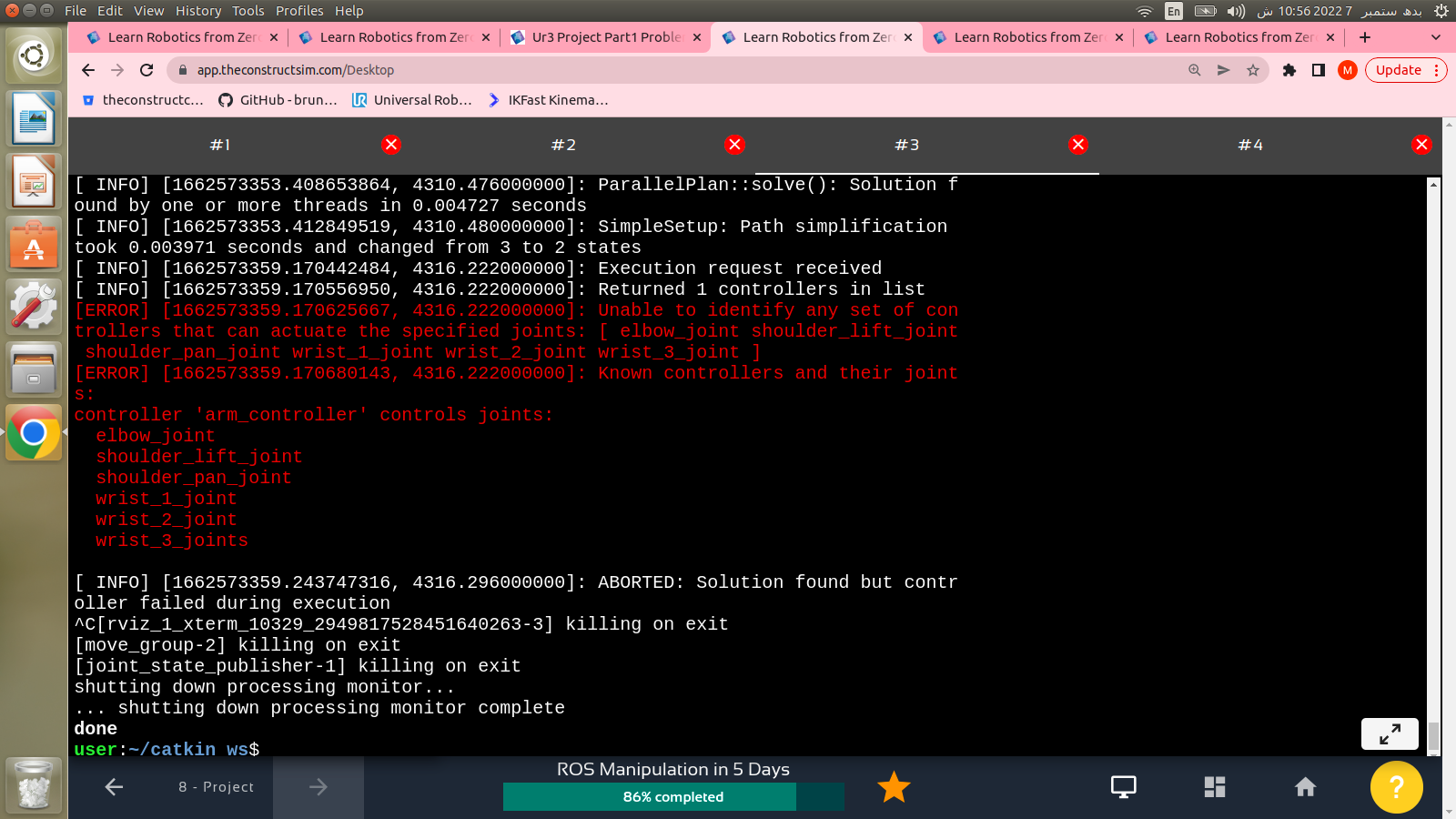
Someone please tell about the error, in rviz every thing is working fine but nothing happens in gazebo, I
tried to solve it but couldnot, Kindly help. ros_controller.yaml file and error images are attached.
Thanks
Hello!
Someone please tell about the error, in rviz every thing is working fine but nothing happens in gazebo, I
tried to solve it but couldnot, Kindly help. ros_controller.yaml file and error images are attached.
Thanks
Hello @misbahsuhail123 ,
We would need some extra data in order debug this issue. For instance:
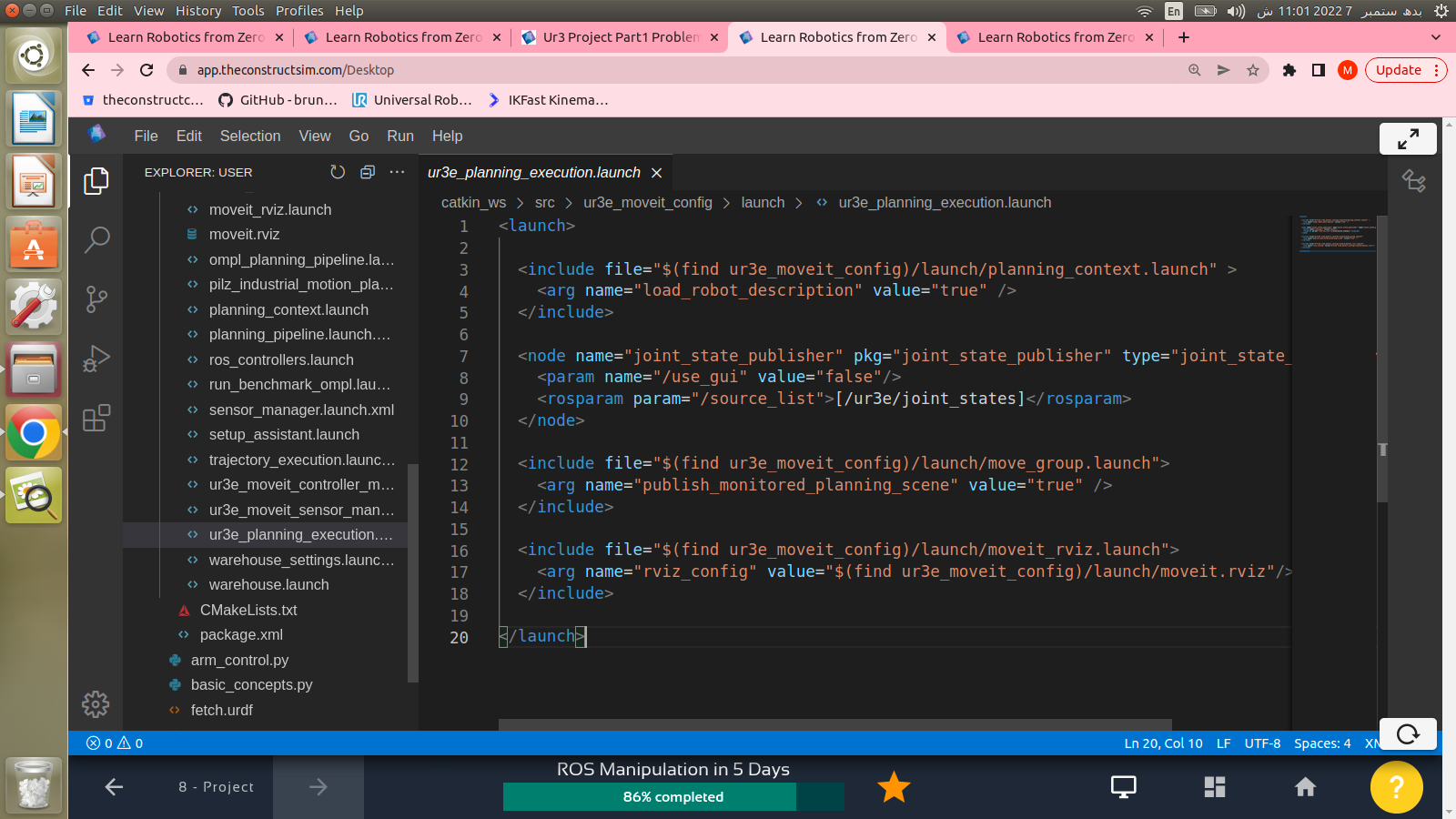
Thanks Alberto for ur quick response, I am sharing the launch file and error i am getting.
Hello @misbahsuhail123 ,
The problem, as indicated in the error message, is with the arm_controller configuration. I can see in the error message that you have named one of the joints wrist_3_joints, but the real name of the joint is wrist_3_joint (without the final “s”). Probably that’s the error.
Although this file ros_controller.yaml creat during moveit pkg, anyways i removed this error but again i am not getting the required result,
First thing, i am getting the same state after launch file execution the video of fetch robot i had sent you, if robot recieving multiple data then from where it is getting, I am following the same steps as mentioned.
Needed help please.
Thanks
This topic was automatically closed after 2 days. New replies are no longer allowed.
Hello @misbahsuhail123 ,
Try commenting out / removing this lines from your launch file:
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher">
<param name="/use_gui" value="false"/>
<rosparam param="/source_list">[/joint_states]</rosparam>
</node>