Hello,
I have a quick question on the Real Robot Project Step 2 of the URDF for ROS2 course.
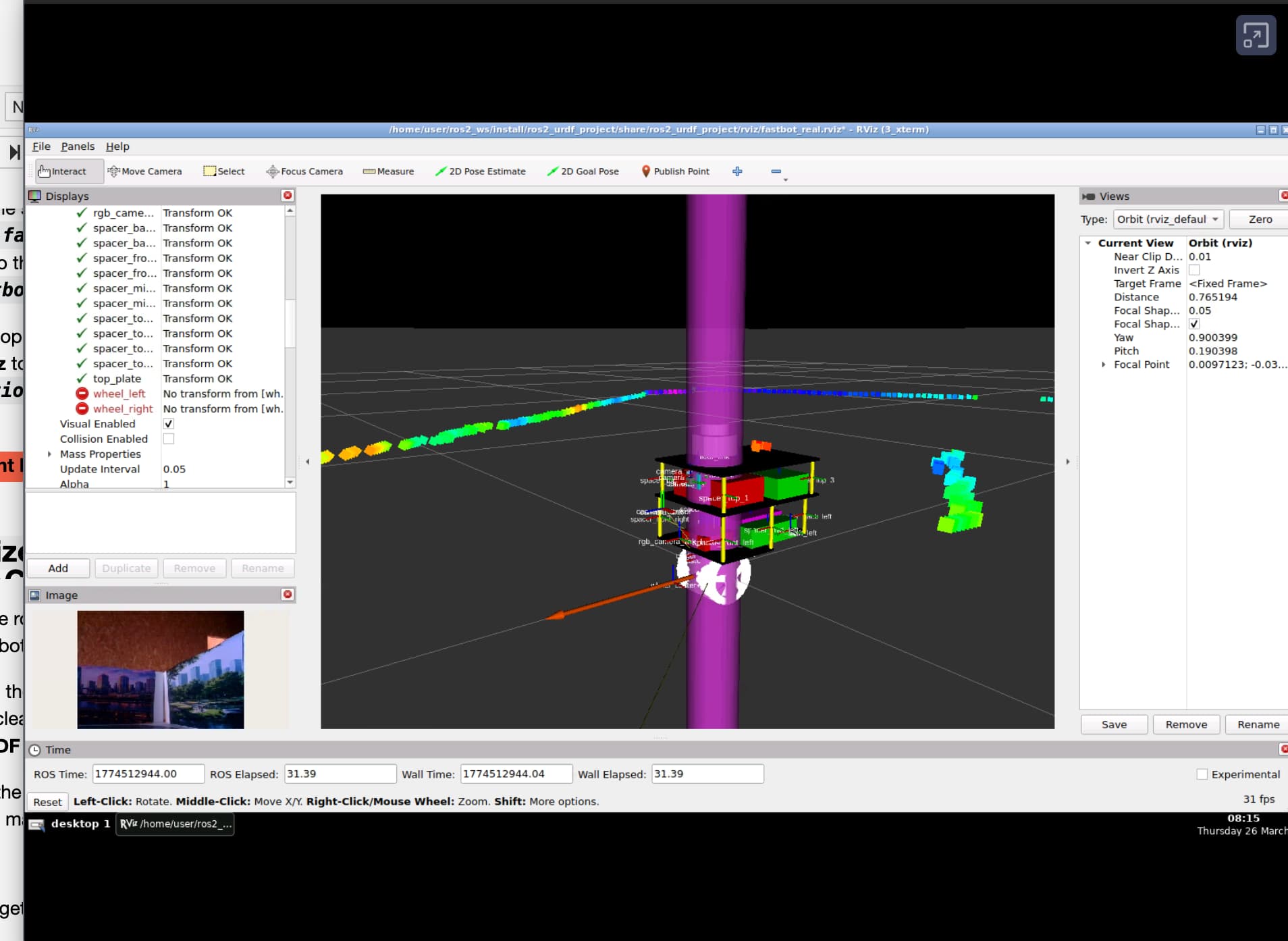
On the real Fastbot I am unclear if I need to use the joint state publisher - I thought not, but my wheels do not get transforms if I do not add a joint state publsher in my launch file:
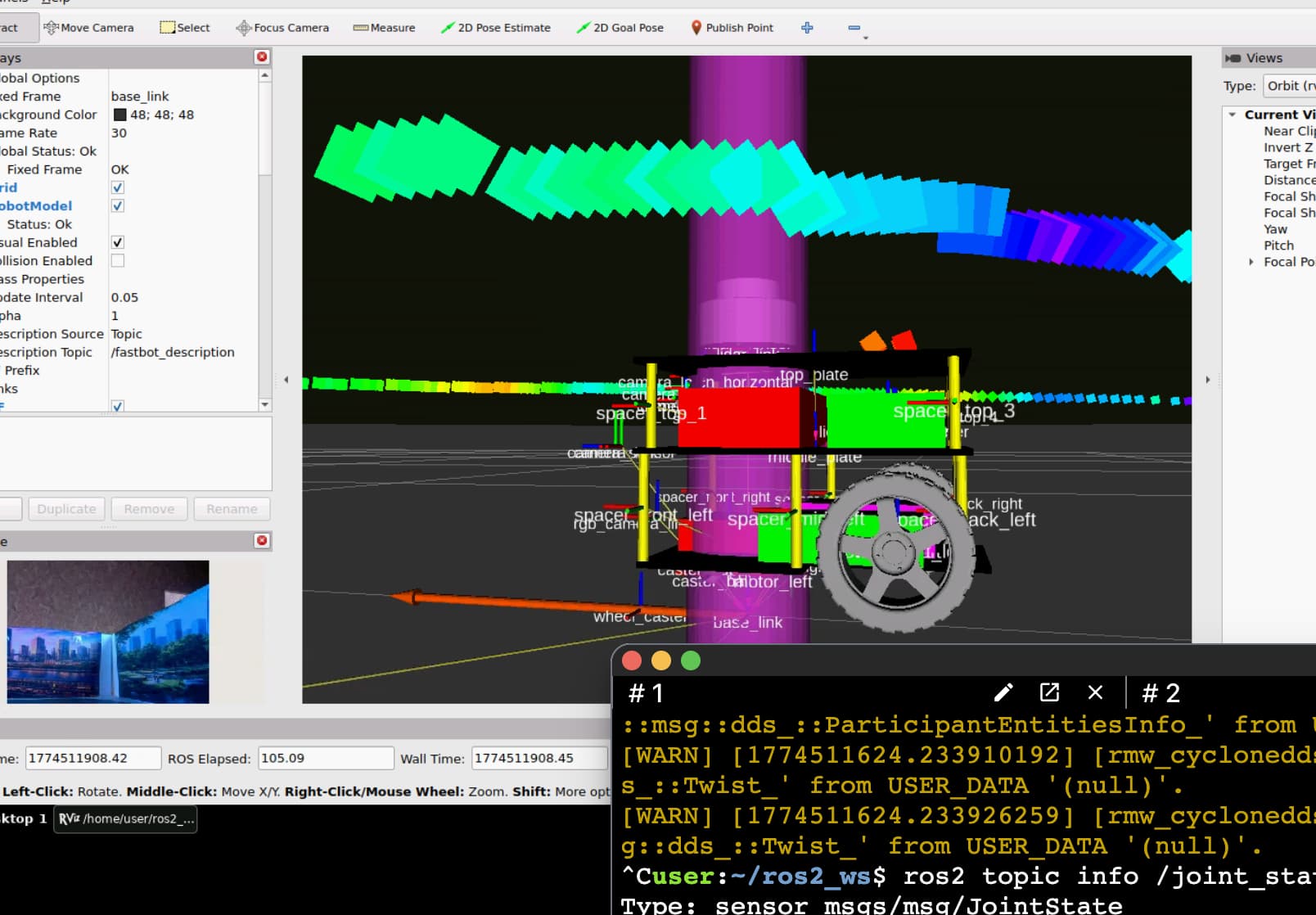
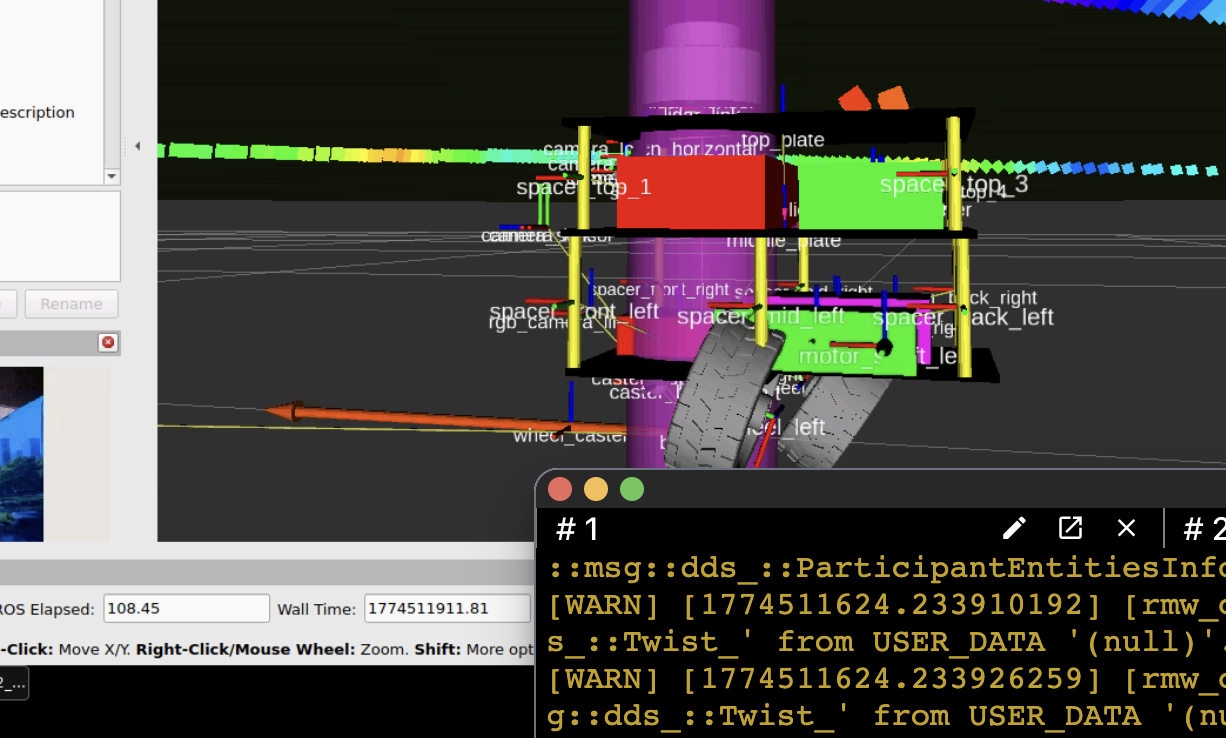
After adding a joint state publisher in my launch file I do get transform data for my wheels, but they flicker into different positions:
I just need some guidance on if the joint state publisher is needed here and some pointers into things to look into. I thought maybe the flickering was due to multiple joint state publisher nodes running. I have my RobotDescription topic set to /fastbot_description as required in the test. Any tips would be greatly appreciated.
Below are my current state publisher and rviz launch files:
#!/usr/bin/env python3
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import Command, LaunchConfiguration
from launch.conditions import IfCondition, UnlessCondition
from launch_ros.actions import Node
def generate_launch_description():
package_description = “ros2_urdf_project”
pkg_share = get_package_share_directory(package_description)
declare_use_sim_time = DeclareLaunchArgument(
'use_sim_time', default_value='false',
description='Use simulation time (true for Gazebo, false for real robot)')
use_sim_time = LaunchConfiguration('use_sim_time')
urdf_sim = os.path.join(pkg_share, 'urdf', 'fastbot_sim.urdf')
urdf_real = os.path.join(pkg_share, 'urdf', 'fastbot_real.urdf')
# Simulation: publishes to /robot_description (default topic)
robot_state_publisher_sim = Node(
package='robot_state_publisher',
executable='robot_state_publisher',
name='robot_state_publisher_node',
emulate_tty=True,
parameters=[{
'use_sim_time': use_sim_time,
'robot_description': Command(['xacro ', urdf_sim]),
}],
output='screen',
condition=IfCondition(use_sim_time),
)
# Real robot: remaps to /fastbot_description
robot_state_publisher_real = Node(
package='robot_state_publisher',
executable='robot_state_publisher',
name='robot_state_publisher_node',
emulate_tty=True,
parameters=[{
'use_sim_time': use_sim_time,
'robot_description': Command(['xacro ', urdf_real]),
}],
remappings=[
('robot_description', 'fastbot_description'),
],
output='screen',
condition=UnlessCondition(use_sim_time),
)
# joint_state_publisher_real = Node(
# package='joint_state_publisher',
# executable='joint_state_publisher',
# name='joint_state_publisher',
# parameters=[{'use_sim_time': False}],
# remappings=[
# ('robot_description', 'fastbot_description'),
# ],
# condition=UnlessCondition(use_sim_time),
# )
return LaunchDescription([
declare_use_sim_time,
robot_state_publisher_sim,
robot_state_publisher_real,
# joint_state_publisher_real
])
#!/usr/bin/env python3
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import LaunchConfiguration
from launch.conditions import IfCondition, UnlessCondition
from launch_ros.actions import Node
def generate_launch_description():
package_description = "ros2_urdf_project"
pkg_share = get_package_share_directory(package_description)
declare_use_sim_time = DeclareLaunchArgument(
'use_sim_time', default_value='false',
description='Use simulation time (true for Gazebo, false for real robot)')
use_sim_time = LaunchConfiguration('use_sim_time')
rviz_sim_config = os.path.join(pkg_share, 'rviz', 'fastbot_sim.rviz')
rviz_real_config = os.path.join(pkg_share, 'rviz', 'fastbot_real.rviz')
rviz_sim = Node(
package='rviz2',
executable='rviz2',
output='screen',
name='rviz_node',
parameters=[{'use_sim_time': use_sim_time}],
arguments=['-d', rviz_sim_config],
condition=IfCondition(use_sim_time),
)
rviz_real = Node(
package='rviz2',
executable='rviz2',
output='screen',
name='rviz_node',
parameters=[{'use_sim_time': use_sim_time}],
arguments=['-d', rviz_real_config],
condition=UnlessCondition(use_sim_time),
)
return LaunchDescription([
declare_use_sim_time,
rviz_sim,
rviz_real,
])
Thanks ![]()