I cannot see redbox in Rviz GUI.
Here is my rviz log
... logging to /home/user/.ros/log/282d981e-daa1-11ee-b356-0242ac120006/roslaunch-1_xterm-8069.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://1_xterm:35707/
SUMMARY
========
PARAMETERS
* /robot_description: <?xml version="1....
* /rosdistro: noetic
* /rosversion: 1.15.11
NODES
/
joint_state_publisher_gui (joint_state_publisher_gui/joint_state_publisher_gui)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
rviz (rviz/rviz)
auto-starting new master
process[master]: started with pid [8085]
ROS_MASTER_URI=http://1_xterm:11311
setting /run_id to 282d981e-daa1-11ee-b356-0242ac120006
process[rosout-1]: started with pid [8104]
started core service [/rosout]
process[joint_state_publisher_gui-2]: started with pid [8107]
process[robot_state_publisher-3]: started with pid [8108]
process[rviz-4]: started with pid [8120]
[ WARN] [1709609620.823748232]: The root link link_chassis has an inertia specified in the URDF, but KDL does not support a root linkwith an inertia. As a workaround, you can add an extra dummy link to your URDF.
QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-user'
QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-user
Here is how I launch
/catkin_ws/src/robot_description/launch$ roslaunch ./rviz.launch
or try
~/catkin_ws/src$ roslaunch robot_description rviz.launch
Both not working.
Here is what I see on GUI, no robot model. I already change the fixed frame to “link_chassis”
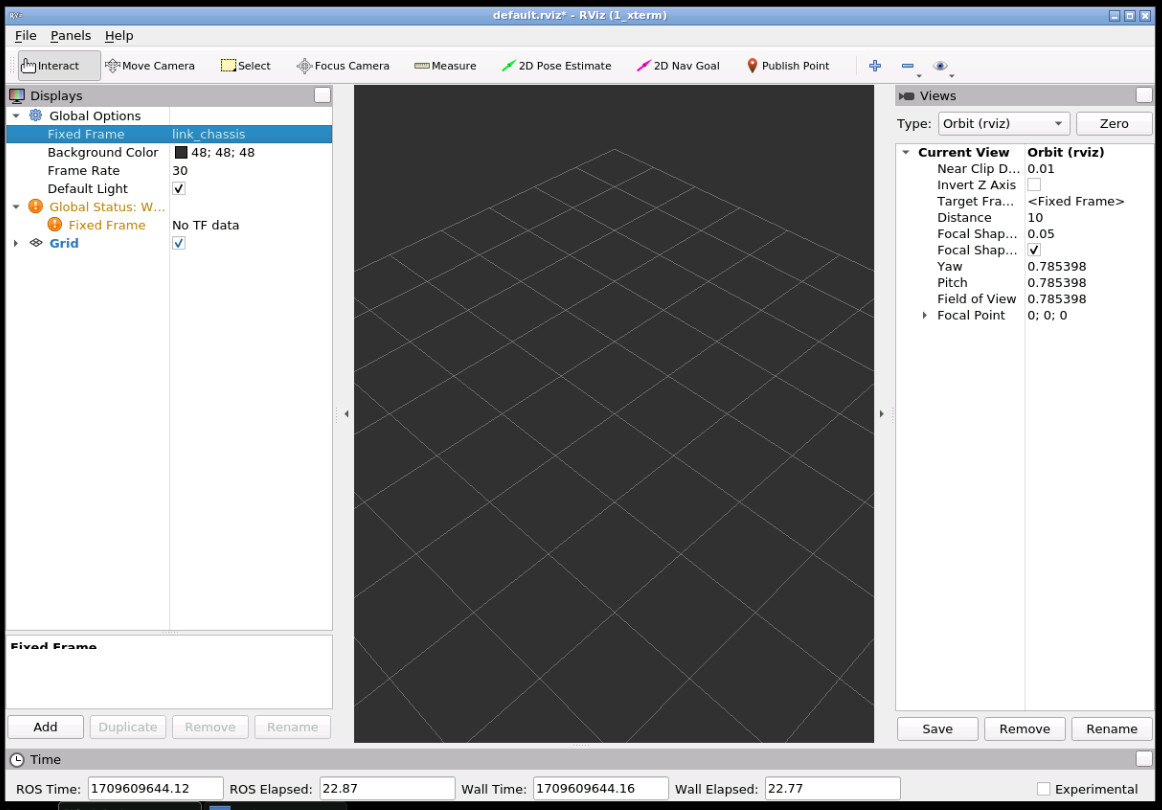
Please help. What did I do wrong