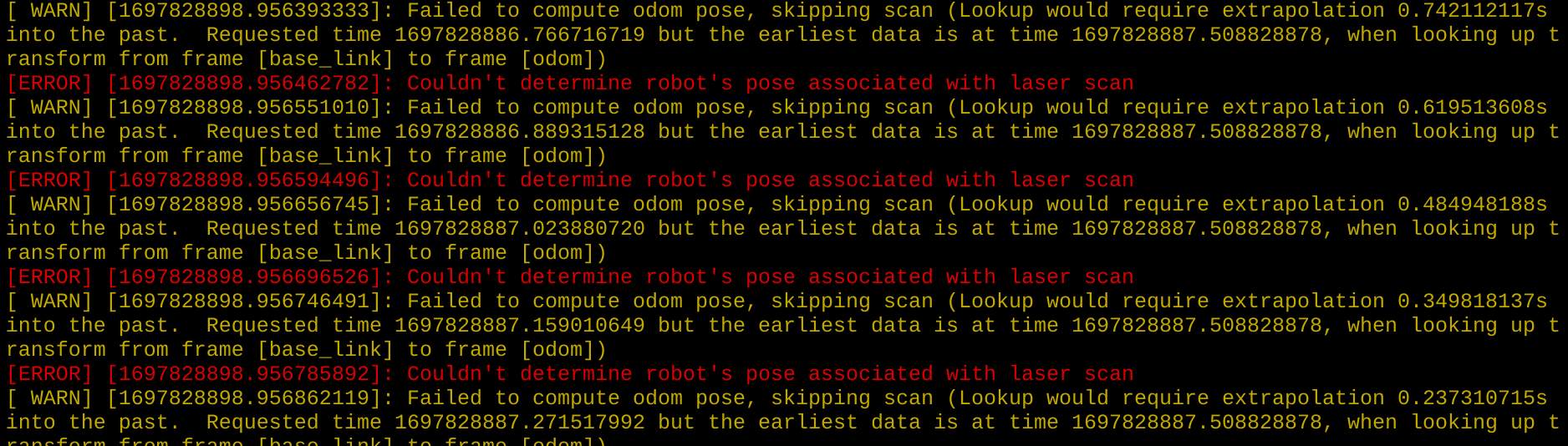
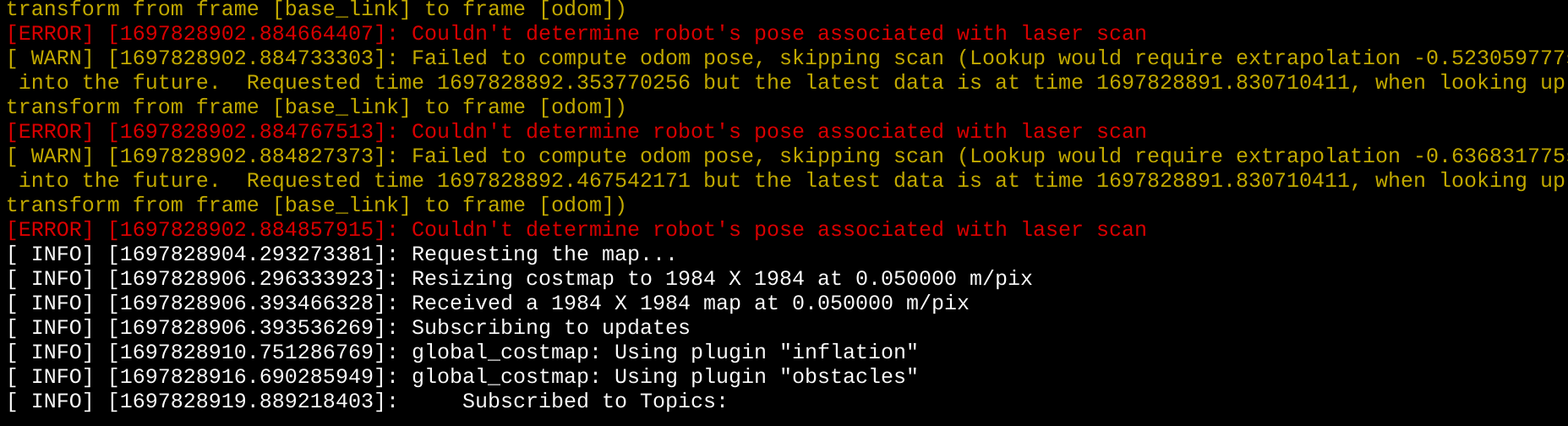
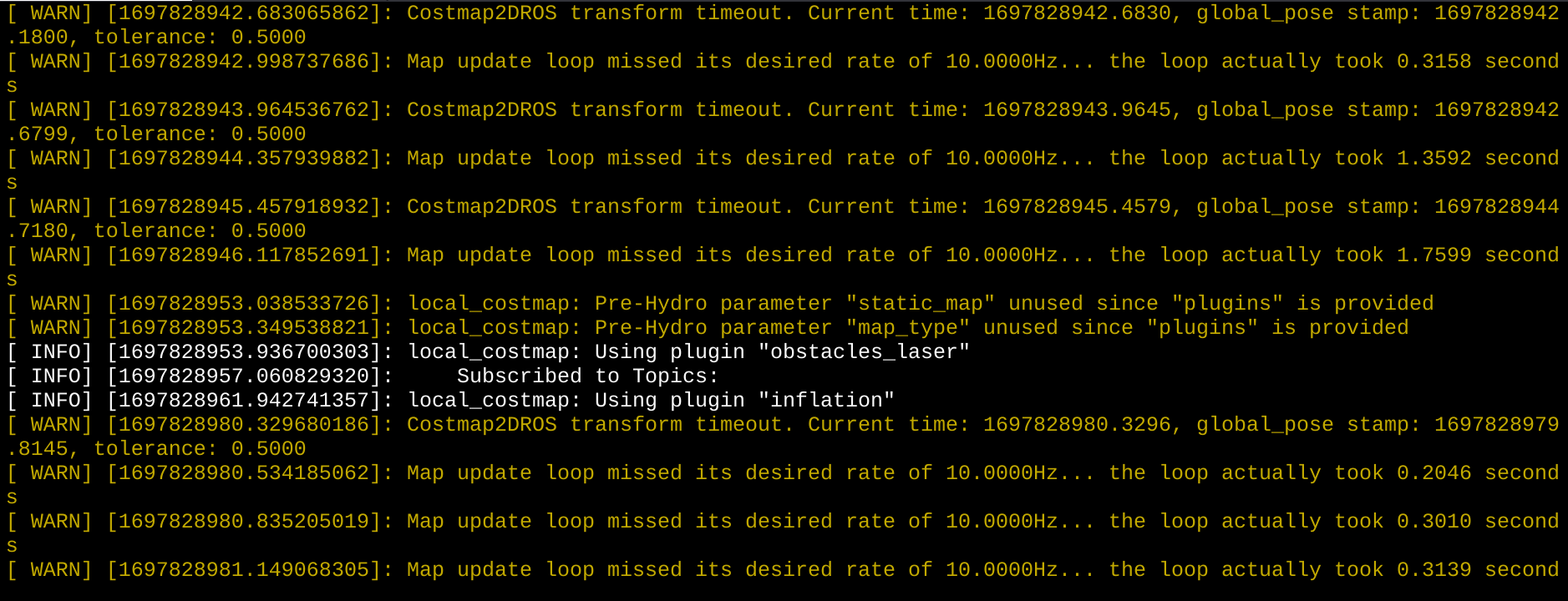
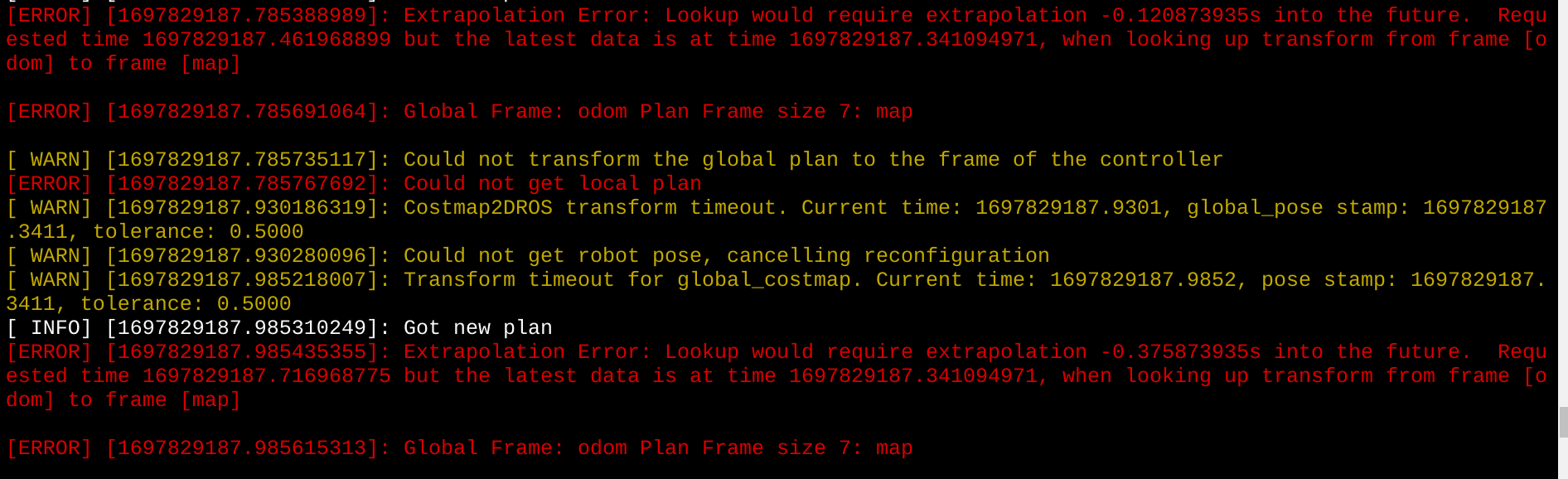
whats the reason for this warning, it always popup while launching move_base node.
and what parameters should i tune for this warning
i used below values for both local and global cost map parameters
publish_frequency: 10.0
update_frequency: 10.0
Other query---------------------------
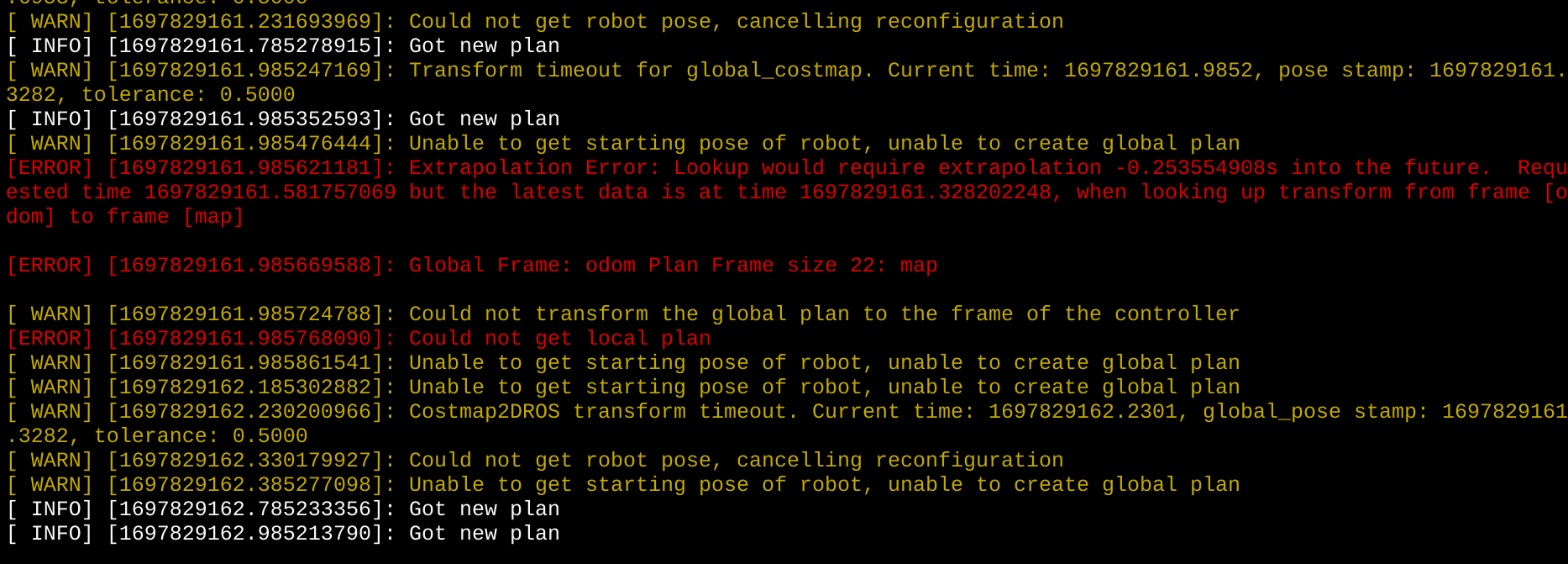
when i send goal, my robot is successfully reaching goal and i can even see the global planner making path with green line, but i cannot see local planner making path, i even changed the colour to red to differentiate both the planners but i can only see green(global) not red(local).
my local planner parameters
DWAPlannerROS:
# Robot Configuration Parameters
max_vel_x: 0.22
min_vel_x: -0.22
max_vel_y: 0.0
min_vel_y: 0.0
# The velocity when robot is moving in a straight line
max_vel_trans: 0.22
min_vel_trans: 0.11
max_vel_theta: 2.75
min_vel_theta: 1.37
acc_lim_x: 2.5
acc_lim_y: 0.0
acc_lim_theta: 3.2
# Goal Tolerance Parameters
xy_goal_tolerance: 0.05
yaw_goal_tolerance: 0.17
latch_xy_goal_tolerance: false
# Forward Simulation Parameters
sim_time: 1.5
vx_samples: 20
vy_samples: 0
vth_samples: 40
controller_frequency: 10.0
# Trajectory Scoring Parameters
path_distance_bias: 32.0
goal_distance_bias: 20.0
occdist_scale: 0.02
forward_point_distance: 0.325
stop_time_buffer: 0.2
scaling_speed: 0.25
max_scaling_factor: 0.2
# Oscillation Prevention Parameters
oscillation_reset_dist: 0.05
# Debugging
publish_traj_pc : true
publish_cost_grid_pc: true