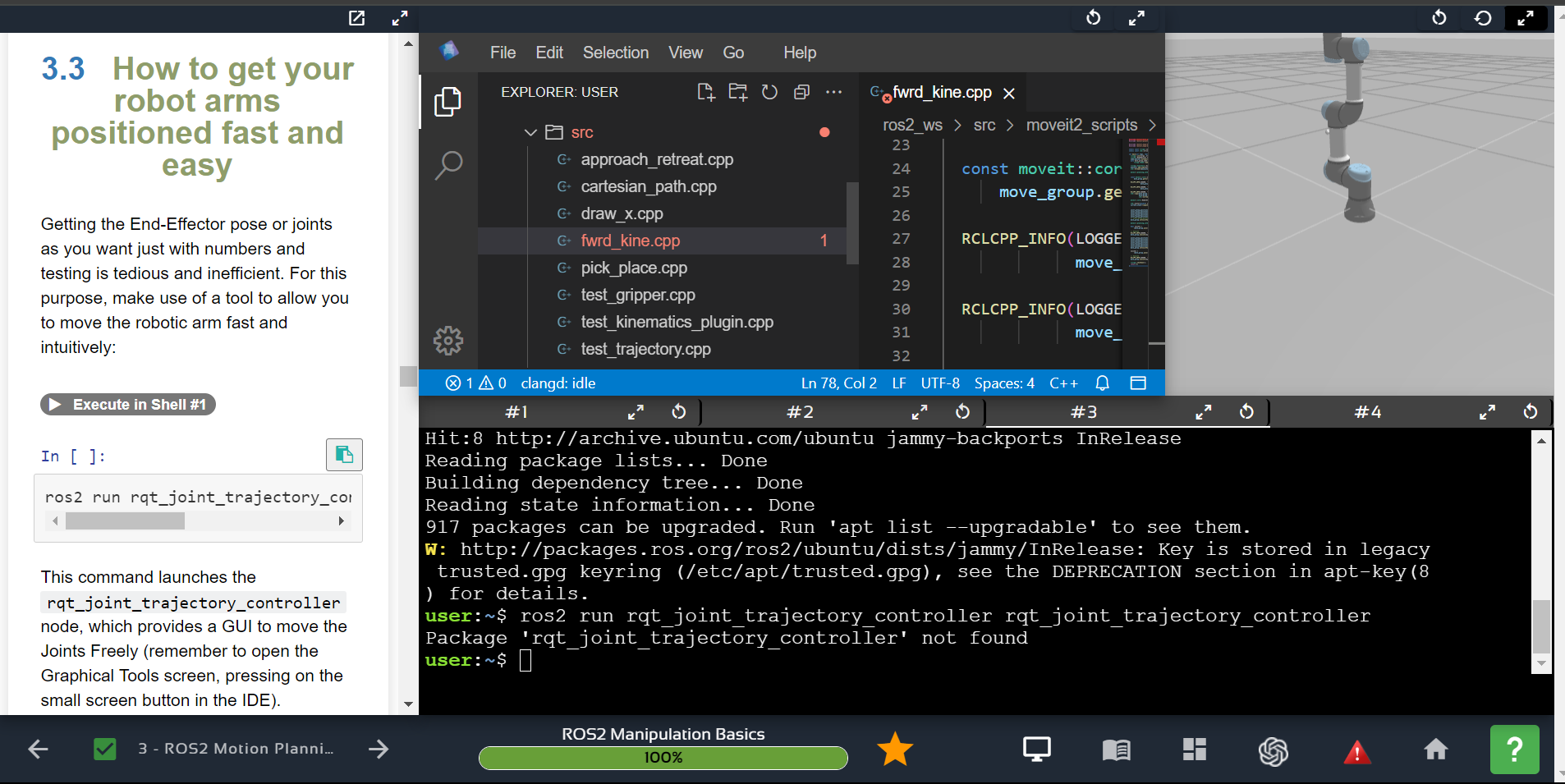
I am getting this error when I try to get the controller.
however I get the error above the not found message
does anyone know how this can be resolved?
ralves
March 8, 2024, 5:43pm
2
Hi @MustaphaJames ,
thanks for reporting the error. I just tested it and confirmed the error is there.
You can install it with the following commands, until we install it in the course environment:
sudo apt-get update
sudo apt-get install -y ros-humble-rqt-joint-trajectory-controller
After that, the command mentioned in the instructions should work nicely:
ros2 run rqt_joint_trajectory_controller rqt_joint_trajectory_controller
Please let us know if you find any other issues.
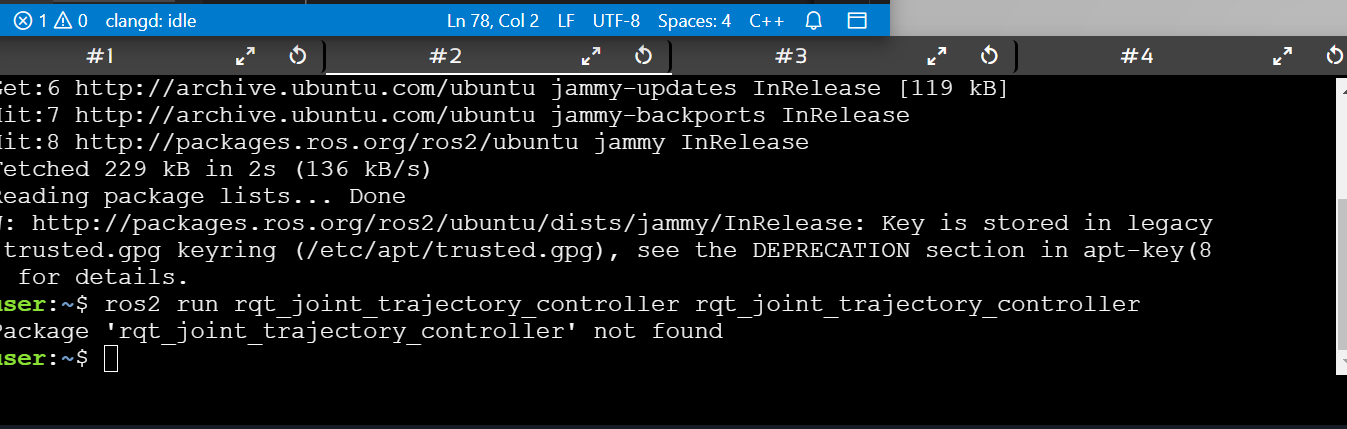
the error remains the same:
ralves
March 8, 2024, 5:56pm
4
Hi @MustaphaJames
Are you sure you ran the two commands below?
The first command, to update the APT sources:
sudo apt-get update
And the second command to actually install the package needed?
sudo apt-get install -y ros-humble-rqt-joint-trajectory-controller
And only then try to run the program?
ros2 run rqt_joint_trajectory_controller rqt_joint_trajectory_controller
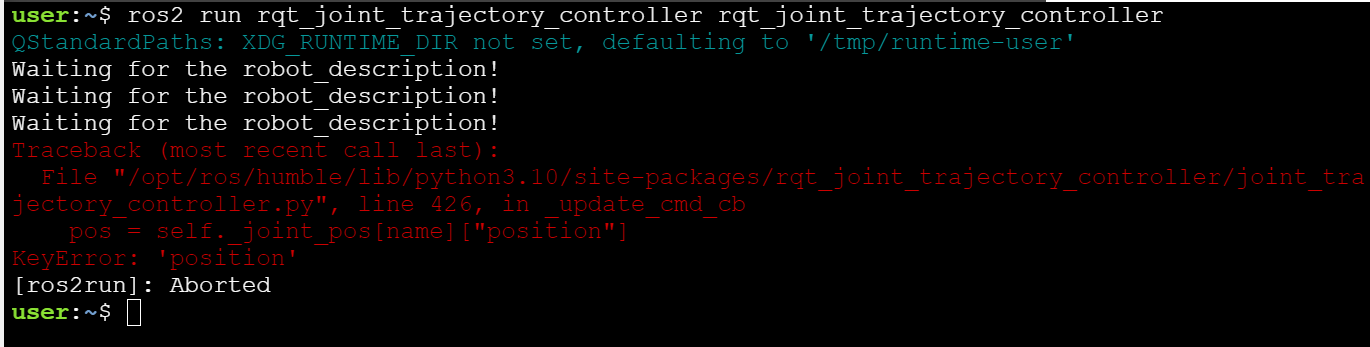
Hello,
Hello @MustaphaJames ,
Can you try restarting the simulation? That might fix the issue. From my experience, I’ve found that rqt_joint_trajectory_controller is quite buggy.
Best,
system
March 19, 2024, 2:12pm
7
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.