Hello, I have started this course (ROS2 Basics in 5 days (C++) ) and I am about to start the first part of the wall following project.
I am trying to launch the simulation as the nootbok explain:
source ~/simulation_ws/install/setup.bash
ros2 launch turtlebot3_gazebo main_turtlebot3_lab.launch.xml
When I launch the source I get the following error:
user:~$ source ~/simulation_ws/install/setup.bash
not found: "/home/user/ros2_ws/install/turtlebot3_node/share/turtlebot3_node/local_setup.bash"
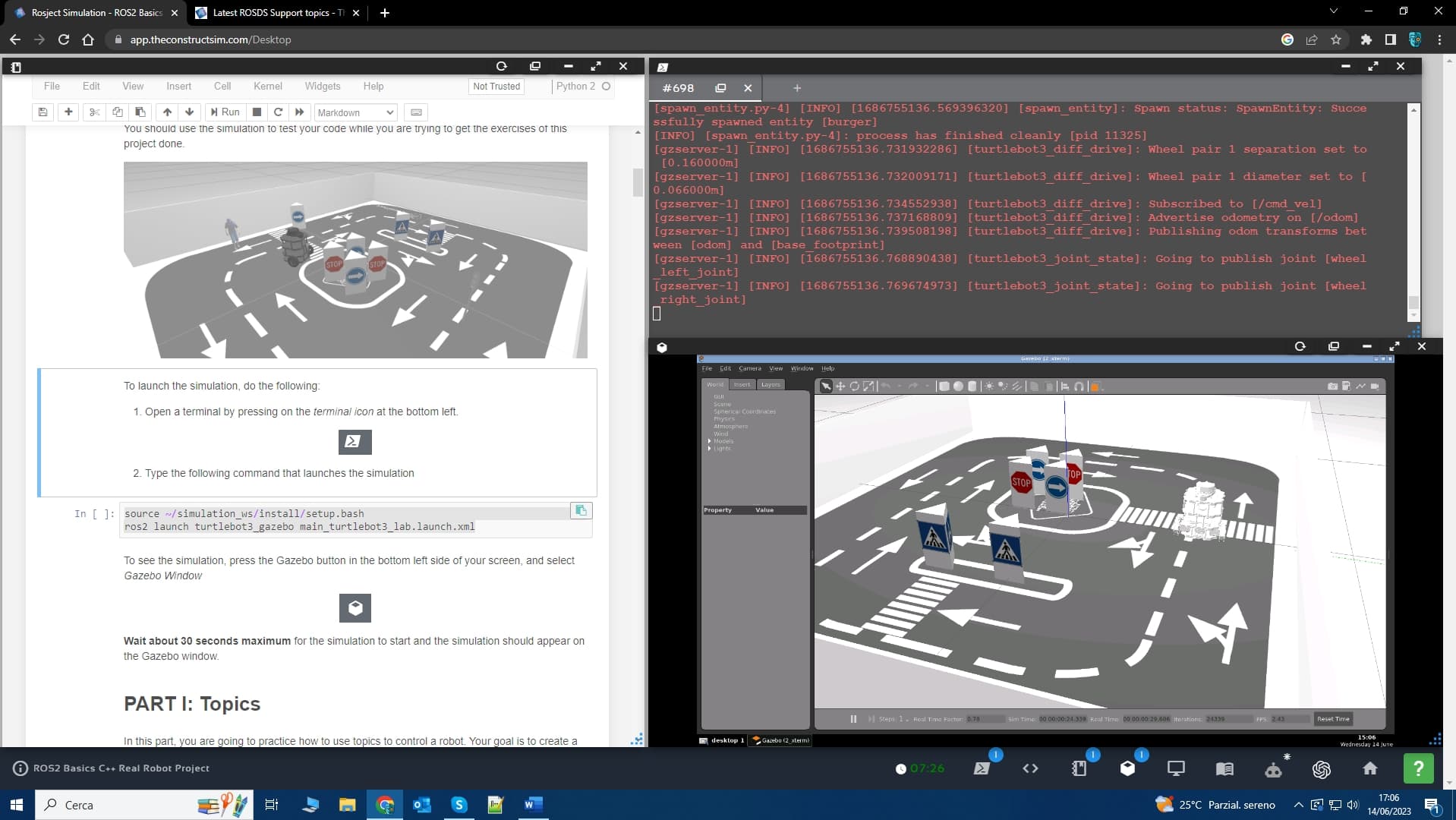
Since I can not source that when I launch Gazebo I see the enviroment, but the turtlebot is light grey because the simulation can not find the robot parts. This is the terminal output:
user:~$ ros2 launch turtlebot3_gazebo main_turtlebot3_lab.launch.xml
[INFO] [launch]: All log files can be found below /home/user/.ros/log/2023-06-14-14-54-42-416578-2_xterm-8317
[INFO] [launch]: Default logging verbosity is set to INFO
GAZEBO MODELS PATH==/usr/share/gazebo-11/models:/usr/share/gazebo-11/models:/usr/share/gazebo-9/models:/usr/share/gazebo/models_robox:/home/user/simulation_ws/install/turtlebot3_description/share:/home/user/simulation_ws/install/turtlebot3_gazebo/share/turtlebot3_gazebo/models:/home/user/simulation_ws/install/turtlebot3_gazebo/share/turtlebot3_gazebo/maps/starbots_complete/models
GAZEBO PLUGINS PATH==/usr/lib/x86_64-linux-gnu/gazebo-11/plugins:/usr/lib/x86_64-linux-gnu/gazebo-11/plugins::/home/user/simulation_ws/install/turtlebot3_description/lib:/opt/ros/foxy/lib
urdf_file_name : turtlebot3_burger.urdf
[INFO] [gzserver-1]: process started with pid [8338]
[INFO] [gzclient --verbose -2]: process started with pid [8340]
[INFO] [robot_state_publisher-3]: process started with pid [8342]
[INFO] [spawn_entity.py-4]: process started with pid [8345]
[gzclient --verbose -2] ++ ls /usr/bin/gzclient-11.5.1
[gzclient --verbose -2] + gzclient_path=/usr/bin/gzclient-11.5.1
[gzclient --verbose -2] + DISPLAY=:2
[gzclient --verbose -2] + /usr/bin/gzclient-11.5.1 --verbose
[robot_state_publisher-3] Parsing robot urdf xml string.
[robot_state_publisher-3] Link base_link had 5 children
[robot_state_publisher-3] Link caster_back_link had 0 children
[robot_state_publisher-3] Link imu_link had 0 children
[robot_state_publisher-3] Link base_scan had 0 children
[robot_state_publisher-3] Link wheel_left_link had 0 children
[robot_state_publisher-3] Link wheel_right_link had 0 children
[robot_state_publisher-3] [INFO] [1686754483.699606502] [robot_state_publisher]: got segment base_footprint
[robot_state_publisher-3] [INFO] [1686754483.699710315] [robot_state_publisher]: got segment base_link
[robot_state_publisher-3] [INFO] [1686754483.699733147] [robot_state_publisher]: got segment base_scan
[robot_state_publisher-3] [INFO] [1686754483.699745981] [robot_state_publisher]: got segment caster_back_link
[robot_state_publisher-3] [INFO] [1686754483.699761818] [robot_state_publisher]: got segment imu_link
[robot_state_publisher-3] [INFO] [1686754483.699775695] [robot_state_publisher]: got segment wheel_left_link
[robot_state_publisher-3] [INFO] [1686754483.699788943] [robot_state_publisher]: got segment wheel_right_link
[gzclient --verbose -2] Gazebo multi-robot simulator, version 11.5.1
[gzclient --verbose -2] Copyright (C) 2012 Open Source Robotics Foundation.
[gzclient --verbose -2] Released under the Apache 2 License.
[gzclient --verbose -2] http://gazebosim.org
[gzclient --verbose -2]
[gzserver-1] Gazebo multi-robot simulator, version 11.5.1
[gzserver-1] Copyright (C) 2012 Open Source Robotics Foundation.
[gzserver-1] Released under the Apache 2 License.
[gzserver-1] http://gazebosim.org
[gzserver-1]
[spawn_entity.py-4] [INFO] [1686754484.665513883] [spawn_entity]: Spawn Entity started
[spawn_entity.py-4] [INFO] [1686754484.666447194] [spawn_entity]: Loading entity XML from file /home/user/simulation_ws/install/turtlebot3_gazebo/share/turtlebot3_gazebo/models/turtlebot3_burger/model.sdf
[spawn_entity.py-4] [INFO] [1686754484.670596959] [spawn_entity]: Waiting for service /spawn_entity, timeout = 30
[spawn_entity.py-4] [INFO] [1686754484.671524692] [spawn_entity]: Waiting for service /spawn_entity
[gzserver-1] [Msg] Waiting for master.
[gzserver-1] [Msg] Connected to gazebo master @ http://192.168.64.6:11345
[gzserver-1] [Msg] Publicized address: 192.168.64.6
[gzserver-1] Warning [parser.cc:723] Can not find the XML attribute 'version' in sdf XML tag for model: ring_road_v2. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will be used
[gzserver-1] Warning [parser.cc:723] Can not find the XML attribute 'version' in sdf XML tag for model: triangular_prism. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will be used
[gzserver-1] Warning [parser.cc:723] Can not find the XML attribute 'version' in sdf XML tag for model: triangular_prism_direccion_obligada. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will be used
[gzserver-1] Warning [parser.cc:723] Can not find the XML attribute 'version' in sdf XML tag for model: triangular_prism_direccion_obligada. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will be used
[gzserver-1] Warning [parser.cc:723] Can not find the XML attribute 'version' in sdf XML tag for model: triangular_prism. Please specify the SDF protocol supported in the model configuration file. The first sdf tag in the config file will be used
[gzserver-1] Warning [parser.cc:723] Can not find the XML attribute 'version' in sdf XML tag for model: triangular_prism_pedestrian. Please specify the SDF protocol supported in the model configuration file. Thefirst sdf tag in the config file will be used
[gzserver-1] Warning [parser.cc:723] Can not find the XML attribute 'version' in sdf XML tag for model: triangular_prism_pedestrian. Please specify the SDF protocol supported in the model configuration file. Thefirst sdf tag in the config file will be used
[gzclient --verbose -2] [Msg] Waiting for master.
[gzclient --verbose -2] [Msg] Connected to gazebo master @ http://192.168.64.6:11345
[gzclient --verbose -2] [Msg] Publicized address: 192.168.64.6
[gzclient --verbose -2] [Wrn] [GuiIface.cc:120] QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to '/tmp/runtime-user'
[gzclient --verbose -2] [Err] [InsertModelWidget.cc:402] Missing model.config for model "/home/user/.gazebo/models/RubberDucky"
[gzclient --verbose -2] [Err] [InsertModelWidget.cc:402] Missing model.config for model "/home/user/.gazebo/models/bases"
[gzclient --verbose -2] [Err] [InsertModelWidget.cc:402] Missing model.config for model "/home/user/.gazebo/models/lms1xx"
[gzclient --verbose -2] [Err] [InsertModelWidget.cc:402] Missing model.config for model "/home/user/.gazebo/models/media"
[gzclient --verbose -2] [Err] [InsertModelWidget.cc:402] Missing model.config for model "/home/user/.gazebo/models/meshes"
[gzclient --verbose -2] [Err] [InsertModelWidget.cc:402] Missing model.config for model "/home/user/.gazebo/models/sensors"
[gzclient --verbose -2] [Err] [InsertModelWidget.cc:402] Missing model.config for model "/home/user/.gazebo/models/turtlebot3_description"
[gzclient --verbose -2] [Err] [InsertModelWidget.cc:402] Missing model.config for model "/home/user/.gazebo/models/wheels"
[gzclient --verbose -2] [Err] [InsertModelWidget.cc:402] Missing model.config for model "/home/user/simulation_ws/install/turtlebot3_gazebo/share/turtlebot3_gazebo/models/bases"
[gzclient --verbose -2] [Err] [InsertModelWidget.cc:402] Missing model.config for model "/home/user/simulation_ws/install/turtlebot3_gazebo/share/turtlebot3_gazebo/models/sensors"
[gzclient --verbose -2] [Err] [InsertModelWidget.cc:402] Missing model.config for model "/home/user/simulation_ws/install/turtlebot3_gazebo/share/turtlebot3_gazebo/models/wheels"
[gzclient --verbose -2] [Err] [InsertModelWidget.cc:402] Missing model.config for model "/home/user/simulation_ws/install/turtlebot3_description/share/ament_index"
[gzclient --verbose -2] [Err] [InsertModelWidget.cc:402] Missing model.config for model "/home/user/simulation_ws/install/turtlebot3_description/share/colcon-core"
[gzclient --verbose -2] [Err] [InsertModelWidget.cc:402] Missing model.config for model "/home/user/simulation_ws/install/turtlebot3_description/share/turtlebot3_description"
[spawn_entity.py-4] [INFO] [1686754485.929335618] [spawn_entity]: Calling service /spawn_entity
[gzserver-1] [INFO] [1686754486.175265154] [turtlebot3_imu]: <initial_orientation_as_reference> is unset,using default value of false to comply with REP 145 (world as orientation reference)
[spawn_entity.py-4] [INFO] [1686754486.362431054] [spawn_entity]: Spawn status: SpawnEntity: Successfullyspawned entity [burger]
[INFO] [spawn_entity.py-4]: process has finished cleanly [pid 8345]
[gzserver-1] [INFO] [1686754486.530529379] [turtlebot3_diff_drive]: Wheel pair 1 separation set to [0.160000m]
[gzserver-1] [INFO] [1686754486.530617758] [turtlebot3_diff_drive]: Wheel pair 1 diameter set to [0.066000m]
[gzserver-1] [INFO] [1686754486.533437895] [turtlebot3_diff_drive]: Subscribed to [/cmd_vel]
[gzserver-1] [INFO] [1686754486.536170391] [turtlebot3_diff_drive]: Advertise odometry on [/odom]
[gzserver-1] [INFO] [1686754486.538869592] [turtlebot3_diff_drive]: Publishing odom transforms between [odom] and [base_footprint]
[gzserver-1] [INFO] [1686754486.570710122] [turtlebot3_joint_state]: Going to publish joint [wheel_left_joint]
[gzserver-1] [INFO] [1686754486.571160237] [turtlebot3_joint_state]: Going to publish joint [wheel_right_joint]
What I am missing?