[ERROR] [1597996272.828425039, 5185.425000000]: Unable to parse component [vim] to a double (while parsing a vector value)
[ERROR] [1597996272.828461188, 5185.425000000]: Could not parse visual element for Link [base_link]
[joint_state_publisher-1] process has died [pid 3222, exit code 1, cmd /opt/ros/kinetic/lib/joint_state_publisher/joint_state_publisher __name:=joint_state_publisher __log:=/home/user/.ros/log/f31096ba-e376-11ea-9b4a-0a59d9125d3a/joint_state_publisher-1.log].
log file: /home/user/.ros/log/f31096ba-e376-11ea-9b4a-0a59d9125d3a/joint_state_publisher-1*.log
[ERROR] [1597996310.418788387, 5222.860000000]: Unable to parse component [vim] to a double (while parsing a vector value)
[ERROR] [1597996310.418825516, 5222.860000000]: Could not parse visual element for Link [base_link]
Hi @waimanliu2010,
can you please post your urdf file you are parsing? Also, which command were you running, that led to the issue?
roslaunch my_mira_description urdf_visualize.launch model:=’$(find my_mira_description)/urdf/mira_simple.urdf’
it on the lesson 2 i copy the entire urdf and launch file from the lesson and follow the instruction to create the mira package
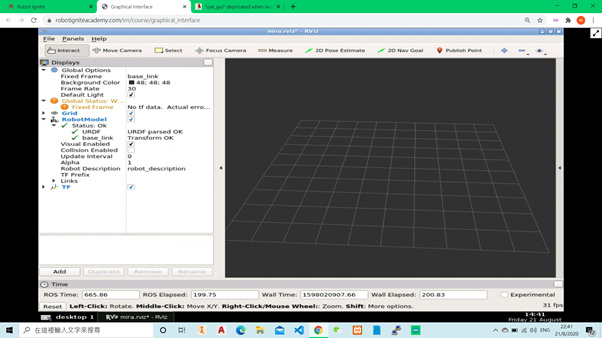
in the robot model setting it shows transform ok but in the fixed frame section it says no tf data ???
The issue is that the joint_state_publisher died, so no joint information gets published. And it failed because of this
so please post your my_mira_description)/urdf/mira_simple.urdf file. The issue should be there in the base_link
<link name="base_link">
<visual>
<origin rpy="0 0 0" xyz=vim "0 0 0"/>
<geometry>
<cylinder radius="0.6" length="0.9"/>
</geometry>
</visual>
<link name="roll_M1_link">
<visual>
<origin rpy="0 0 0" xyz="0 0 0"/>
<geometry>
<cylinder radius="0.2" length="0.5"/>
</geometry>
</visual>
</link>
<joint name="roll_joint" type="revolute">
<parent link="base_link"/>
<child link="roll_M1_link"/>
<origin xyz="0.023 0 -0.005" rpy="0 0 0"/>
<limit lower="-0.2" upper="0.2" effort="0.1" velocity="0.005"/>
<axis xyz="1 0 0"/>
</joint>
i dont know why but its working now , thanks for your help
but there are a new error: [WARN] [1598070728.879323, 0.000000]: The ‘use_gui’ parameter was specified, which is deprecated. We’ll attempt to find and run the GUI, but if this fails you should install the ‘joint_state_publisher_gui’ package instead and run that. This backwards compatibility option will be removed in Noetic.
when i run the roslaunch
and i cant find the joint control" window in the rviz gui

Your indentation is wrong. I think that causes the issue. Should be
<link name="base_link">
<visual>
<origin rpy="0 0 0" xyz=vim "0 0 0"/>
<geometry>
<cylinder radius="0.6" length="0.9"/>
</geometry>
</visual>