I am doing the ROS control course and am about to create a controller.
In the torturial, I’m supposed to update the package.xml with the following, before doing a catkin_make:
<controller_interface plugin="${prefix}/controller_plugins.xml"/>
inside the tag.
I get an error and I’m confused about the low amount of pointers, regarding how to set up the package.xml.
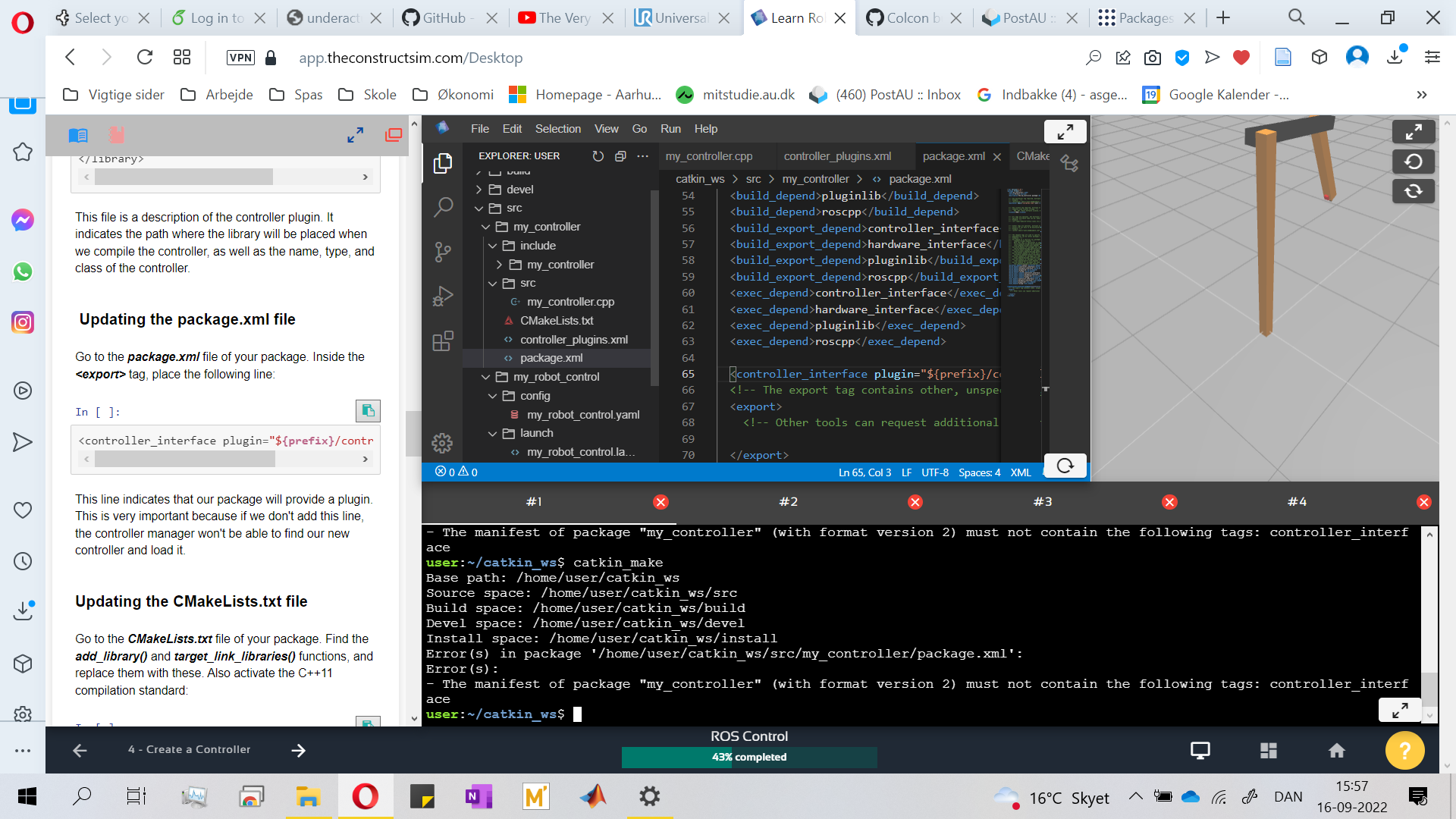
I have uploaded an image of the error I receive when I use catkin_make. You can see where I’ve placed the snippet in my package.xml on the image.
Maybe the placement is completely wrong.
Please put that line after the <export> tag before the closing </export> tag.
Here is the complete package.xml file. Please compare your package.xml with this one.
<?xml version="1.0"?>
<package format="2">
<name>my_controller</name>
<version>0.0.0</version>
<description>The my_controller package</description>
<!-- One maintainer tag required, multiple allowed, one person per tag -->
<!-- Example: -->
<!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> -->
<maintainer email="user@todo.todo">user</maintainer>
<!-- One license tag required, multiple allowed, one license per tag -->
<!-- Commonly used license strings: -->
<!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 -->
<license>TODO</license>
<!-- Url tags are optional, but multiple are allowed, one per tag -->
<!-- Optional attribute type can be: website, bugtracker, or repository -->
<!-- Example: -->
<!-- <url type="website">http://wiki.ros.org/my_controller</url> -->
<!-- Author tags are optional, multiple are allowed, one per tag -->
<!-- Authors do not have to be maintainers, but could be -->
<!-- Example: -->
<!-- <author email="jane.doe@example.com">Jane Doe</author> -->
<!-- The *depend tags are used to specify dependencies -->
<!-- Dependencies can be catkin packages or system dependencies -->
<!-- Examples: -->
<!-- Use depend as a shortcut for packages that are both build and exec dependencies -->
<!-- <depend>roscpp</depend> -->
<!-- Note that this is equivalent to the following: -->
<!-- <build_depend>roscpp</build_depend> -->
<!-- <exec_depend>roscpp</exec_depend> -->
<!-- Use build_depend for packages you need at compile time: -->
<!-- <build_depend>message_generation</build_depend> -->
<!-- Use build_export_depend for packages you need in order to build against this package: -->
<!-- <build_export_depend>message_generation</build_export_depend> -->
<!-- Use buildtool_depend for build tool packages: -->
<!-- <buildtool_depend>catkin</buildtool_depend> -->
<!-- Use exec_depend for packages you need at runtime: -->
<!-- <exec_depend>message_runtime</exec_depend> -->
<!-- Use test_depend for packages you need only for testing: -->
<!-- <test_depend>gtest</test_depend> -->
<!-- Use doc_depend for packages you need only for building documentation: -->
<!-- <doc_depend>doxygen</doc_depend> -->
<buildtool_depend>catkin</buildtool_depend>
<build_depend>controller_interface</build_depend>
<build_depend>hardware_interface</build_depend>
<build_depend>pluginlib</build_depend>
<build_depend>roscpp</build_depend>
<build_export_depend>controller_interface</build_export_depend>
<build_export_depend>hardware_interface</build_export_depend>
<build_export_depend>pluginlib</build_export_depend>
<build_export_depend>roscpp</build_export_depend>
<exec_depend>controller_interface</exec_depend>
<exec_depend>hardware_interface</exec_depend>
<exec_depend>pluginlib</exec_depend>
<exec_depend>roscpp</exec_depend>
<!-- The export tag contains other, unspecified, tags -->
<export>
<!-- Other tools can request additional information be placed here -->
<controller_interface plugin="${prefix}/controller_plugins.xml"/>
</export>
</package>