Hi there,
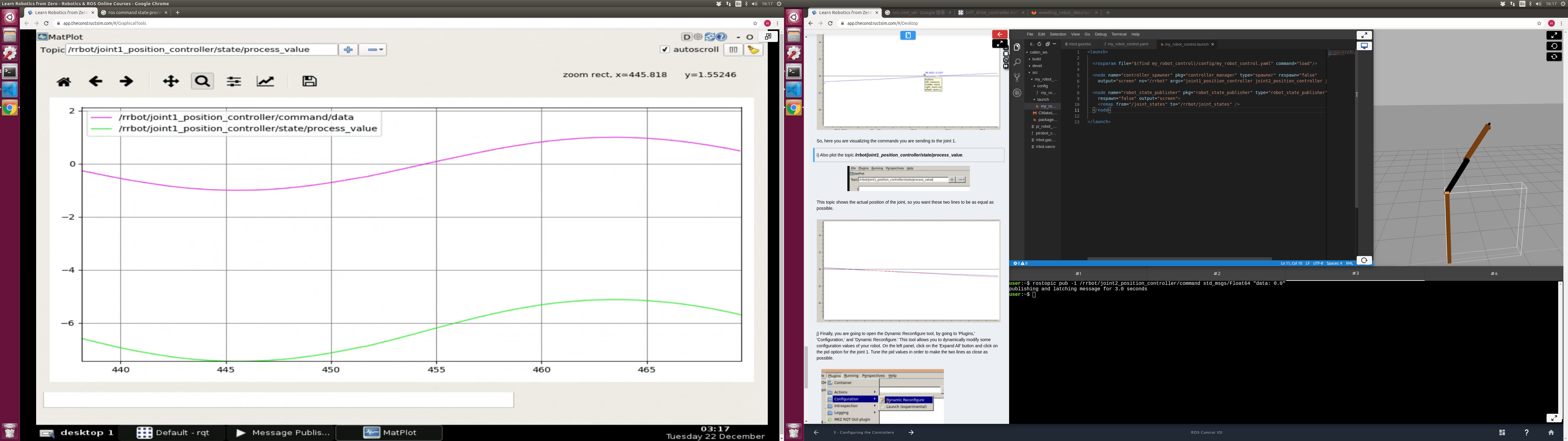
I am following the Ros control tutorial. according to the tutorial, the /rrbot/joint1_position_controller/state/process_value and /rrbot/joint1_position_controller/command should be similar but it is totally different.
How can i fix this?
thanks
Hello @hank880907,
I’ve been doing some tests here and everything seems to be working fine. There is a small error but it’s acceptable, as you can see in the below screenshot I took:
Please make sure that you follow the instructions as they are described in the notebook.
Best,