I subscribed to ROS2 Manipulation Basics course as I thought it would teach about how I can connect to a real universal Robot. I am a beginner in this field and learning this course so that I can connect to a real robot and not in a simulated environment.
Is there any course or any way I can actually configure and connect to a real universal robot?
Thank you so much for your reply. I am actually familiar with Linux and ROS2. I have an UR5e real robot which I can control through ROS2 humble. But with UR5e I have attached a wrist camera and 2f-85 gripper from Robotiq. And now I am trying to control UR5e + wrist camera + 2f-85 gripper with ros2. I cannot find URDF file for wrist camera, but I was able to add gripper to it and simulate it in Gazebo. But I am not sure how to connect transmission for controlling both (robot+gripper) with ROS2 and how to configure the URDF and SRDF for real robot with wrist camera and gripper.
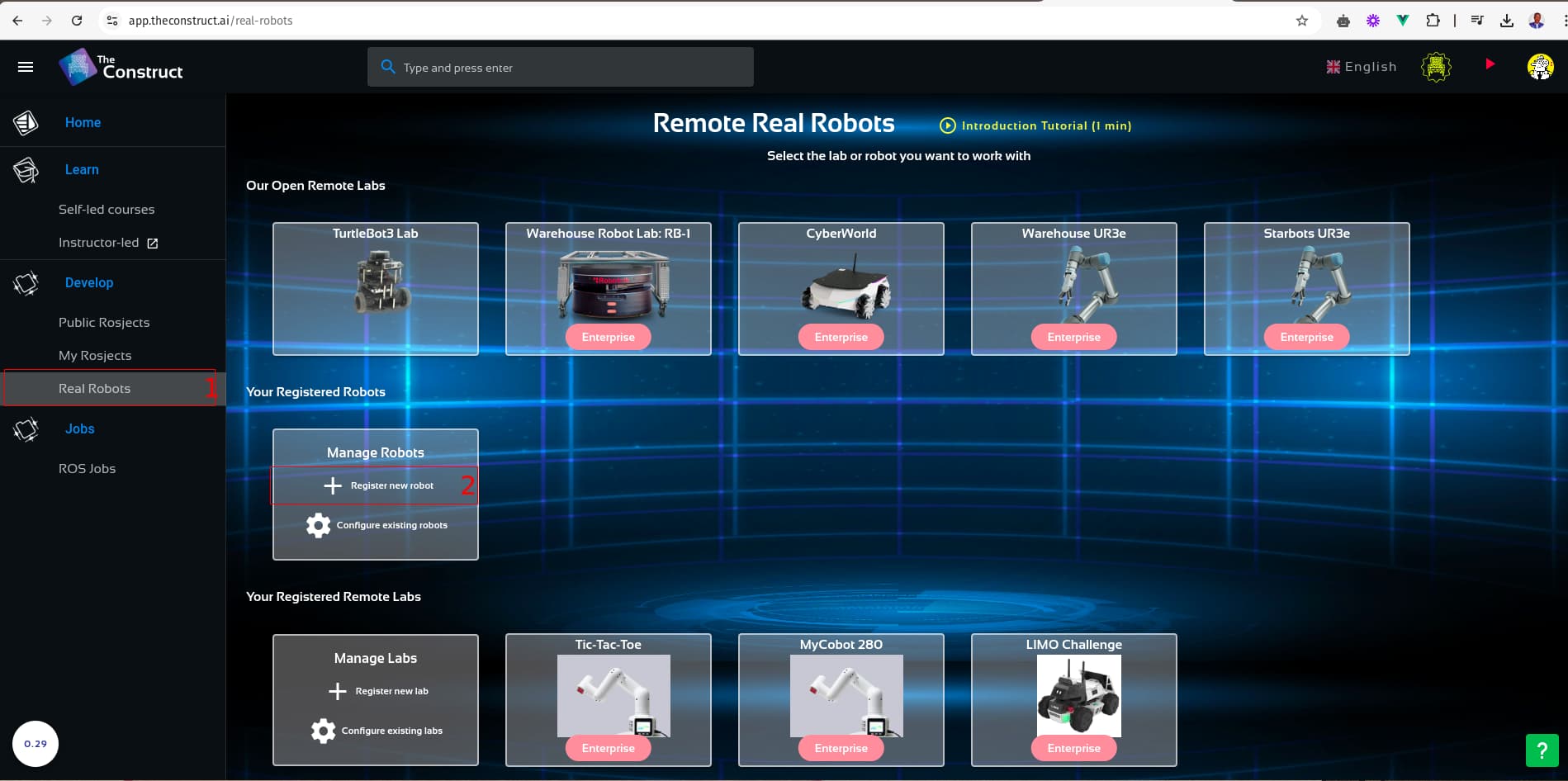
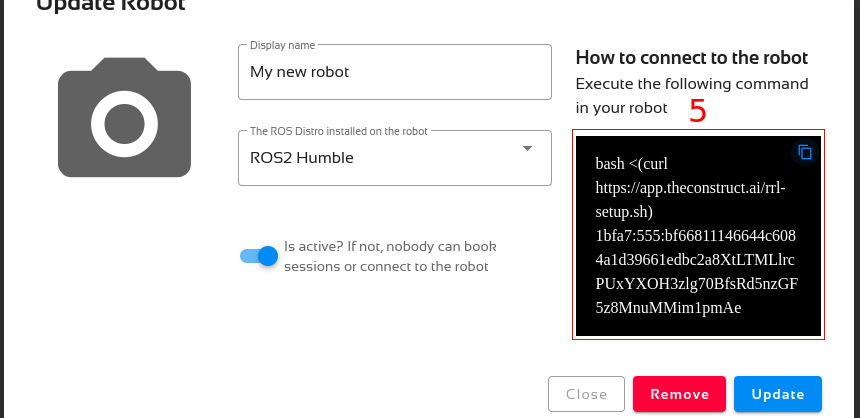
Moreover, I am not sure how I can attach/register my robot to construct platform with a bash file. Where and how to run the file?
I was hoping to learn how to connect and configure a real robot in construct platform but its only simulation…