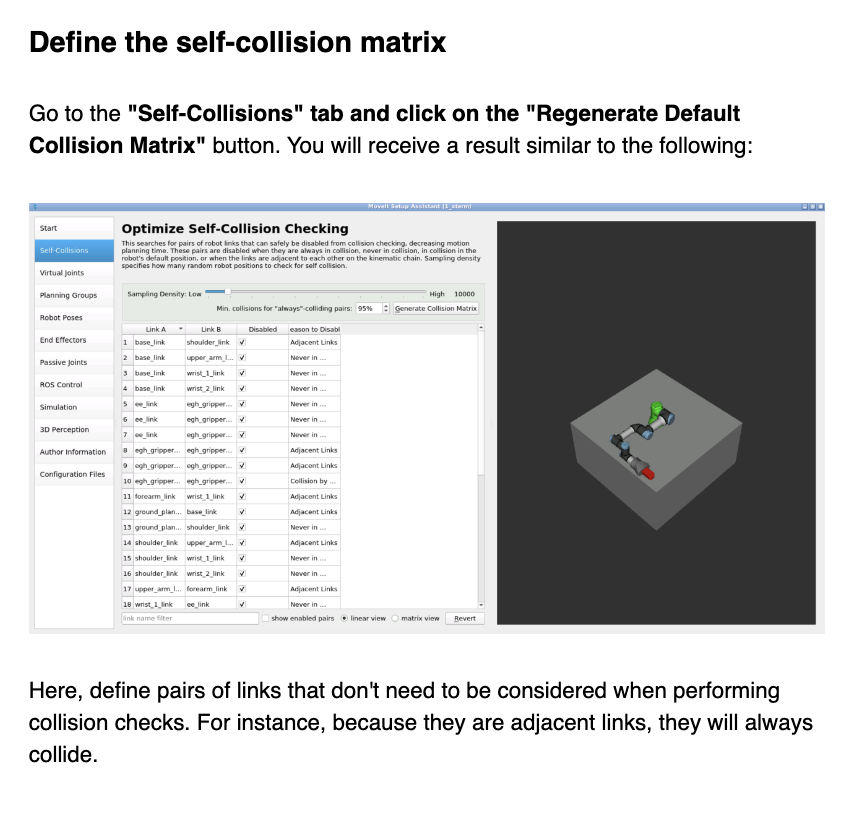
Hi!
i just took the course and did the installation of moveit2 package using setup assistant
but look like there are some problem with installation that being warned here.![]()
roslaunch moveit_setup_assistant setup_assistant.launch
… logging to /home/user/.ros/log/f79b0f16-2bc2-11ee-99ff-0242ac170006/roslaunch-3_xterm-904.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://3_xterm:36759/
SUMMARY
PARAMETERS
- /rosdistro: noetic
- /rosversion: 1.15.11
NODES
/
moveit_setup_assistant (moveit_setup_assistant/moveit_setup_assistant)
ROS_MASTER_URI=http://3_simulation:11311
process[moveit_setup_assistant-1]: started with pid [931]
QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to ‘/tmp/runtime-user’
[ INFO] [1690382788.394639706, 95.579000000]: Loaded ur3e robot model.
[ INFO] [1690382788.397739344, 95.582000000]: Setting Param Server with Robot Description
[ INFO] [1690382788.401927840, 95.586000000]: Robot semantic model successfully loaded.
[ INFO] [1690382788.401976785, 95.586000000]: Setting Param Server with Robot Semantic Description
[ INFO] [1690382788.415397035, 95.600000000]: Loading robot model ‘ur3e’…
[ INFO] [1690382788.416097425, 95.600000000]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ INFO] [1690382788.638001500, 95.821000000]: Stereo is NOT SUPPORTED
[ INFO] [1690382788.638103473, 95.822000000]: OpenGL device: llvmpipe (LLVM 10.0.0, 256 bits)
[ INFO] [1690382788.638176514, 95.822000000]: OpenGl version: 3.1 (GLSL 1.4).
[ INFO] [1690382788.746518656, 95.926000000]: Loading robot model ‘ur3e’…
[ INFO] [1690382788.746976861, 95.926000000]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ INFO] [1690382794.344528429, 101.504000000]: Loading Setup Assistant Complete
[ INFO] [1690382858.950095993, 165.687000000]: Updating kinematic model
[ INFO] [1690382858.950334150, 165.687000000]: Loading robot model ‘ur3e’…
[ WARN] [1690382858.950391982, 165.687000000]: Skipping virtual joint ‘fixed_base’ because its child frame ‘base_link’ does not match the URDF frame ‘world’
[ INFO] [1690382858.950444338, 165.687000000]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ INFO] [1690382930.759087119, 237.047000000]: Updating kinematic model
[ WARN] [1690382930.759273576, 237.047000000]: Group ‘ur_manipulator’ is empty.
[ INFO] [1690382930.759342869, 237.047000000]: Loading robot model ‘ur3e’…
[ WARN] [1690382930.759384916, 237.047000000]: Skipping virtual joint ‘fixed_base’ because its child frame ‘base_link’ does not match the URDF frame ‘world’
[ INFO] [1690382930.759428788, 237.047000000]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ WARN] [1690382930.791030818, 237.079000000]: Group ‘ur_manipulator’ must have at least one validjoint
[ WARN] [1690382930.791095024, 237.079000000]: Failed to add group ‘ur_manipulator’
[ INFO] [1690382963.980536296, 269.060000000]: Updating kinematic model
[ INFO] [1690382963.981938489, 269.062000000]: Loading robot model ‘ur3e’…
[ WARN] [1690382963.981979829, 269.062000000]: Skipping virtual joint ‘fixed_base’ because its child frame ‘base_link’ does not match the URDF frame ‘world’
[ INFO] [1690382963.982000302, 269.062000000]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ INFO] [1690383015.742413468, 317.732000000]: Updating kinematic model
[ INFO] [1690383015.742584027, 317.732000000]: Loading robot model ‘ur3e’…
[ WARN] [1690383015.742640010, 317.732000000]: Skipping virtual joint ‘fixed_base’ because its child frame ‘base_link’ does not match the URDF frame ‘world’
[ INFO] [1690383015.742687486, 317.732000000]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ERROR] [1690383220.919850529, 505.978000000]: Failed to generate entire configuration package
^C[moveit_setup_assistant-1] killing on exit
shutting down processing monitor…
… shutting down processing monitor complete
done
![]()
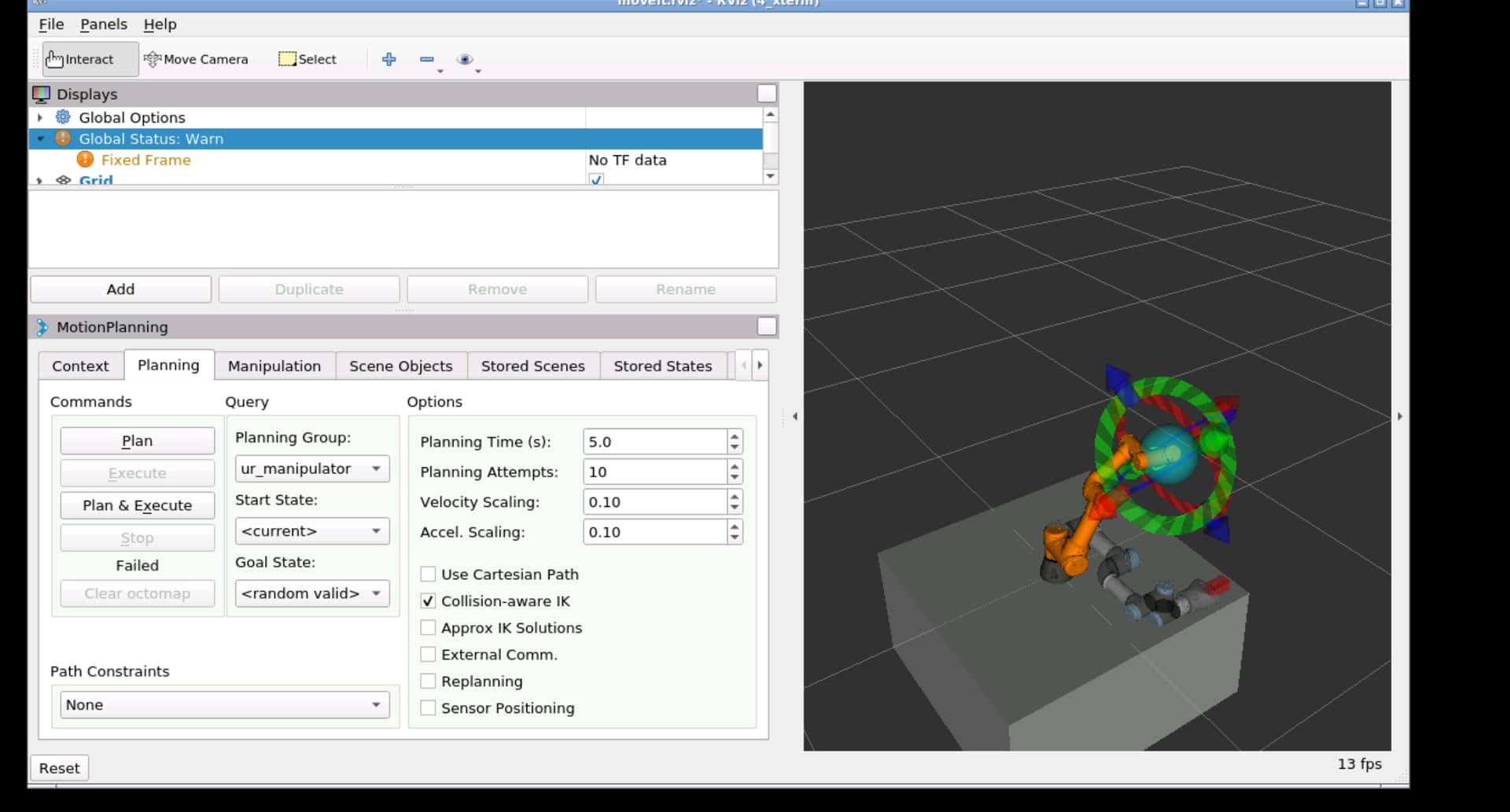
And after i try to do open RVIZ with demo.launch
this is what it shows in terminal
source ~/catkin_ws/devel/setup.bash
user:~$ roslaunch my_moveit_config demo.launch
… logging to /home/user/.ros/log/f79b0f16-2bc2-11ee-99ff-0242ac170006/roslaunch-3_xterm-6407.log
Checking log directory for disk usage. This may take a while.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://3_xterm:33781/
SUMMARY
PARAMETERS
- /move_group/allow_trajectory_execution: True
- /move_group/capabilities:
- /move_group/controller_list: [{‘name’: 'fake_u…
- /move_group/default_planning_pipeline: ompl
- /move_group/disable_capabilities:
- /move_group/initial: [{‘group’: 'ur_ma…
- /move_group/jiggle_fraction: 0.05
- /move_group/max_range: 5.0
- /move_group/max_safe_path_cost: 1
- /move_group/moveit_controller_manager: moveit_fake_contr…
- /move_group/moveit_manage_controllers: True
- /move_group/octomap_resolution: 0.025
- /move_group/planning_pipelines/chomp/collision_clearence: 0.2
- /move_group/planning_pipelines/chomp/collision_threshold: 0.07
- /move_group/planning_pipelines/chomp/enable_failure_recovery: True
- /move_group/planning_pipelines/chomp/joint_update_limit: 0.1
- /move_group/planning_pipelines/chomp/learning_rate: 0.01
- /move_group/planning_pipelines/chomp/max_iterations: 200
- /move_group/planning_pipelines/chomp/max_iterations_after_collision_free: 5
- /move_group/planning_pipelines/chomp/max_recovery_attempts: 5
- /move_group/planning_pipelines/chomp/obstacle_cost_weight: 1.0
- /move_group/planning_pipelines/chomp/planning_plugin: chomp_interface/C…
- /move_group/planning_pipelines/chomp/planning_time_limit: 10.0
- /move_group/planning_pipelines/chomp/pseudo_inverse_ridge_factor: 1e-4
- /move_group/planning_pipelines/chomp/request_adapters: default_planner_r…
- /move_group/planning_pipelines/chomp/ridge_factor: 0.01
- /move_group/planning_pipelines/chomp/smoothness_cost_acceleration: 1.0
- /move_group/planning_pipelines/chomp/smoothness_cost_jerk: 0.0
- /move_group/planning_pipelines/chomp/smoothness_cost_velocity: 0.0
- /move_group/planning_pipelines/chomp/smoothness_cost_weight: 0.1
- /move_group/planning_pipelines/chomp/start_state_max_bounds_error: 0.1
- /move_group/planning_pipelines/chomp/use_pseudo_inverse: False
- /move_group/planning_pipelines/chomp/use_stochastic_descent: True
- /move_group/planning_pipelines/ompl/gripper/planner_configs: ['AnytimePathShor…
- /move_group/planning_pipelines/ompl/planner_configs/AnytimePathShortening/hybridize: True
- /move_group/planning_pipelines/ompl/planner_configs/AnytimePathShortening/max_hybrid_paths: 24
- /move_group/planning_pipelines/ompl/planner_configs/AnytimePathShortening/num_planners: 4
- /move_group/planning_pipelines/ompl/planner_configs/AnytimePathShortening/planners:
- /move_group/planning_pipelines/ompl/planner_configs/AnytimePathShortening/shortcut: True
- /move_group/planning_pipelines/ompl/planner_configs/AnytimePathShortening/type: geometric::Anytim…
- /move_group/planning_pipelines/ompl/planner_configs/BFMT/balanced: 0
- /move_group/planning_pipelines/ompl/planner_configs/BFMT/cache_cc: 1
- /move_group/planning_pipelines/ompl/planner_configs/BFMT/extended_fmt: 1
- /move_group/planning_pipelines/ompl/planner_configs/BFMT/heuristics: 1
- /move_group/planning_pipelines/ompl/planner_configs/BFMT/nearest_k: 1
- /move_group/planning_pipelines/ompl/planner_configs/BFMT/num_samples: 1000
- /move_group/planning_pipelines/ompl/planner_configs/BFMT/optimality: 1
- /move_group/planning_pipelines/ompl/planner_configs/BFMT/radius_multiplier: 1.0
- /move_group/planning_pipelines/ompl/planner_configs/BFMT/type: geometric::BFMT
- /move_group/planning_pipelines/ompl/planner_configs/BKPIECE/border_fraction: 0.9
- /move_group/planning_pipelines/ompl/planner_configs/BKPIECE/failed_expansion_score_factor: 0.5
- /move_group/planning_pipelines/ompl/planner_configs/BKPIECE/min_valid_path_fraction: 0.5
- /move_group/planning_pipelines/ompl/planner_configs/BKPIECE/range: 0.0
- /move_group/planning_pipelines/ompl/planner_configs/BKPIECE/type: geometric::BKPIECE
- /move_group/planning_pipelines/ompl/planner_configs/BiEST/range: 0.0
- /move_group/planning_pipelines/ompl/planner_configs/BiEST/type: geometric::BiEST
- /move_group/planning_pipelines/ompl/planner_configs/BiTRRT/cost_threshold: 1e300
- /move_group/planning_pipelines/ompl/planner_configs/BiTRRT/frountier_node_ratio: 0.1
- /move_group/planning_pipelines/ompl/planner_configs/BiTRRT/frountier_threshold: 0.0
- /move_group/planning_pipelines/ompl/planner_configs/BiTRRT/init_temperature: 100
- /move_group/planning_pipelines/ompl/planner_configs/BiTRRT/range: 0.0
- /move_group/planning_pipelines/ompl/planner_configs/BiTRRT/temp_change_factor: 0.1
- /move_group/planning_pipelines/ompl/planner_configs/BiTRRT/type: geometric::BiTRRT
- /move_group/planning_pipelines/ompl/planner_configs/EST/goal_bias: 0.05
- /move_group/planning_pipelines/ompl/planner_configs/EST/range: 0.0
- /move_group/planning_pipelines/ompl/planner_configs/EST/type: geometric::EST
- /move_group/planning_pipelines/ompl/planner_configs/FMT/cache_cc: 1
- /move_group/planning_pipelines/ompl/planner_configs/FMT/extended_fmt: 1
- /move_group/planning_pipelines/ompl/planner_configs/FMT/heuristics: 0
- /move_group/planning_pipelines/ompl/planner_configs/FMT/nearest_k: 1
- /move_group/planning_pipelines/ompl/planner_configs/FMT/num_samples: 1000
- /move_group/planning_pipelines/ompl/planner_configs/FMT/radius_multiplier: 1.1
- /move_group/planning_pipelines/ompl/planner_configs/FMT/type: geometric::FMT
- /move_group/planning_pipelines/ompl/planner_configs/KPIECE/border_fraction: 0.9
- /move_group/planning_pipelines/ompl/planner_configs/KPIECE/failed_expansion_score_factor: 0.5
- /move_group/planning_pipelines/ompl/planner_configs/KPIECE/goal_bias: 0.05
- /move_group/planning_pipelines/ompl/planner_configs/KPIECE/min_valid_path_fraction: 0.5
- /move_group/planning_pipelines/ompl/planner_configs/KPIECE/range: 0.0
- /move_group/planning_pipelines/ompl/planner_configs/KPIECE/type: geometric::KPIECE
- /move_group/planning_pipelines/ompl/planner_configs/LBKPIECE/border_fraction: 0.9
- /move_group/planning_pipelines/ompl/planner_configs/LBKPIECE/min_valid_path_fraction: 0.5
- /move_group/planning_pipelines/ompl/planner_configs/LBKPIECE/range: 0.0
- /move_group/planning_pipelines/ompl/planner_configs/LBKPIECE/type: geometric::LBKPIECE
- /move_group/planning_pipelines/ompl/planner_configs/LBTRRT/epsilon: 0.4
- /move_group/planning_pipelines/ompl/planner_configs/LBTRRT/goal_bias: 0.05
- /move_group/planning_pipelines/ompl/planner_configs/LBTRRT/range: 0.0
- /move_group/planning_pipelines/ompl/planner_configs/LBTRRT/type: geometric::LBTRRT
- /move_group/planning_pipelines/ompl/planner_configs/LazyPRM/range: 0.0
- /move_group/planning_pipelines/ompl/planner_configs/LazyPRM/type: geometric::LazyPRM
- /move_group/planning_pipelines/ompl/planner_configs/LazyPRMstar/type: geometric::LazyPR…
- /move_group/planning_pipelines/ompl/planner_configs/PDST/type: geometric::PDST
- /move_group/planning_pipelines/ompl/planner_configs/PRM/max_nearest_neighbors: 10
- /move_group/planning_pipelines/ompl/planner_configs/PRM/type: geometric::PRM
- /move_group/planning_pipelines/ompl/planner_configs/PRMstar/type: geometric::PRMstar
- /move_group/planning_pipelines/ompl/planner_configs/ProjEST/goal_bias: 0.05
- /move_group/planning_pipelines/ompl/planner_configs/ProjEST/range: 0.0
- /move_group/planning_pipelines/ompl/planner_configs/ProjEST/type: geometric::ProjEST
- /move_group/planning_pipelines/ompl/planner_configs/RRT/goal_bias: 0.05
- /move_group/planning_pipelines/ompl/planner_configs/RRT/range: 0.0
- /move_group/planning_pipelines/ompl/planner_configs/RRT/type: geometric::RRT
- /move_group/planning_pipelines/ompl/planner_configs/RRTConnect/range: 0.0
- /move_group/planning_pipelines/ompl/planner_configs/RRTConnect/type: geometric::RRTCon…
- /move_group/planning_pipelines/ompl/planner_configs/RRTstar/delay_collision_checking: 1
- /move_group/planning_pipelines/ompl/planner_configs/RRTstar/goal_bias: 0.05
- /move_group/planning_pipelines/ompl/planner_configs/RRTstar/range: 0.0
- /move_group/planning_pipelines/ompl/planner_configs/RRTstar/type: geometric::RRTstar
- /move_group/planning_pipelines/ompl/planner_configs/SBL/range: 0.0
- /move_group/planning_pipelines/ompl/planner_configs/SBL/type: geometric::SBL
- /move_group/planning_pipelines/ompl/planner_configs/SPARS/dense_delta_fraction: 0.001
- /move_group/planning_pipelines/ompl/planner_configs/SPARS/max_failures: 1000
- /move_group/planning_pipelines/ompl/planner_configs/SPARS/sparse_delta_fraction: 0.25
- /move_group/planning_pipelines/ompl/planner_configs/SPARS/stretch_factor: 3.0
- /move_group/planning_pipelines/ompl/planner_configs/SPARS/type: geometric::SPARS
- /move_group/planning_pipelines/ompl/planner_configs/SPARStwo/dense_delta_fraction: 0.001
- /move_group/planning_pipelines/ompl/planner_configs/SPARStwo/max_failures: 5000
- /move_group/planning_pipelines/ompl/planner_configs/SPARStwo/sparse_delta_fraction: 0.25
- /move_group/planning_pipelines/ompl/planner_configs/SPARStwo/stretch_factor: 3.0
- /move_group/planning_pipelines/ompl/planner_configs/SPARStwo/type: geometric::SPARStwo
- /move_group/planning_pipelines/ompl/planner_configs/STRIDE/degree: 16
- /move_group/planning_pipelines/ompl/planner_configs/STRIDE/estimated_dimension: 0.0
- /move_group/planning_pipelines/ompl/planner_configs/STRIDE/goal_bias: 0.05
- /move_group/planning_pipelines/ompl/planner_configs/STRIDE/max_degree: 18
- /move_group/planning_pipelines/ompl/planner_configs/STRIDE/max_pts_per_leaf: 6
- /move_group/planning_pipelines/ompl/planner_configs/STRIDE/min_degree: 12
- /move_group/planning_pipelines/ompl/planner_configs/STRIDE/min_valid_path_fraction: 0.2
- /move_group/planning_pipelines/ompl/planner_configs/STRIDE/range: 0.0
- /move_group/planning_pipelines/ompl/planner_configs/STRIDE/type: geometric::STRIDE
- /move_group/planning_pipelines/ompl/planner_configs/STRIDE/use_projected_distance: 0
- /move_group/planning_pipelines/ompl/planner_configs/TRRT/frountierNodeRatio: 0.1
- /move_group/planning_pipelines/ompl/planner_configs/TRRT/frountier_threshold: 0.0
- /move_group/planning_pipelines/ompl/planner_configs/TRRT/goal_bias: 0.05
- /move_group/planning_pipelines/ompl/planner_configs/TRRT/init_temperature: 10e-6
- /move_group/planning_pipelines/ompl/planner_configs/TRRT/k_constant: 0.0
- /move_group/planning_pipelines/ompl/planner_configs/TRRT/max_states_failed: 10
- /move_group/planning_pipelines/ompl/planner_configs/TRRT/min_temperature: 10e-10
- /move_group/planning_pipelines/ompl/planner_configs/TRRT/range: 0.0
- /move_group/planning_pipelines/ompl/planner_configs/TRRT/temp_change_factor: 2.0
- /move_group/planning_pipelines/ompl/planner_configs/TRRT/type: geometric::TRRT
- /move_group/planning_pipelines/ompl/planning_plugin: ompl_interface/OM…
- /move_group/planning_pipelines/ompl/request_adapters: default_planner_r…
- /move_group/planning_pipelines/ompl/start_state_max_bounds_error: 0.1
- /move_group/planning_pipelines/ompl/ur_manipulator/longest_valid_segment_fraction: 0.005
- /move_group/planning_pipelines/ompl/ur_manipulator/planner_configs: ['AnytimePathShor…
- /move_group/planning_pipelines/ompl/ur_manipulator/projection_evaluator: joints(shoulder_p…
- /move_group/planning_pipelines/pilz_industrial_motion_planner/capabilities: pilz_industrial_m…
- /move_group/planning_pipelines/pilz_industrial_motion_planner/planning_plugin: pilz_industrial_m…
- /move_group/planning_pipelines/pilz_industrial_motion_planner/request_adapters:
- /move_group/planning_pipelines/pilz_industrial_motion_planner/start_state_max_bounds_error: 0.1
- /move_group/planning_scene_monitor/publish_geometry_updates: True
- /move_group/planning_scene_monitor/publish_planning_scene: True
- /move_group/planning_scene_monitor/publish_state_updates: True
- /move_group/planning_scene_monitor/publish_transforms_updates: True
- /move_group/sensors: [{}]
- /move_group/trajectory_execution/allowed_execution_duration_scaling: 1.2
- /move_group/trajectory_execution/allowed_goal_duration_margin: 0.5
- /move_group/trajectory_execution/allowed_start_tolerance: 0.01
- /robot_description: <?xml version="1…
- /robot_description_kinematics/ur_manipulator/kinematics_solver: kdl_kinematics_pl…
- /robot_description_kinematics/ur_manipulator/kinematics_solver_search_resolution: 0.005
- /robot_description_kinematics/ur_manipulator/kinematics_solver_timeout: 0.005
- /robot_description_planning/cartesian_limits/max_rot_vel: 1.57
- /robot_description_planning/cartesian_limits/max_trans_acc: 2.25
- /robot_description_planning/cartesian_limits/max_trans_dec: -5
- /robot_description_planning/cartesian_limits/max_trans_vel: 1
- /robot_description_planning/default_acceleration_scaling_factor: 0.1
- /robot_description_planning/default_velocity_scaling_factor: 0.1
- /robot_description_planning/joint_limits/egh_gripper_finger_left_joint/has_acceleration_limits: False
- /robot_description_planning/joint_limits/egh_gripper_finger_left_joint/has_velocity_limits: True
- /robot_description_planning/joint_limits/egh_gripper_finger_left_joint/max_acceleration: 0
- /robot_description_planning/joint_limits/egh_gripper_finger_left_joint/max_velocity: 0.0525
- /robot_description_planning/joint_limits/egh_gripper_finger_right_joint/has_acceleration_limits: False
- /robot_description_planning/joint_limits/egh_gripper_finger_right_joint/has_velocity_limits: True
- /robot_description_planning/joint_limits/egh_gripper_finger_right_joint/max_acceleration: 0
- /robot_description_planning/joint_limits/egh_gripper_finger_right_joint/max_velocity: 0.0525
- /robot_description_planning/joint_limits/elbow_joint/has_acceleration_limits: False
- /robot_description_planning/joint_limits/elbow_joint/has_velocity_limits: True
- /robot_description_planning/joint_limits/elbow_joint/max_acceleration: 0
- /robot_description_planning/joint_limits/elbow_joint/max_velocity: 3.14
- /robot_description_planning/joint_limits/shoulder_lift_joint/has_acceleration_limits: False
- /robot_description_planning/joint_limits/shoulder_lift_joint/has_velocity_limits: True
- /robot_description_planning/joint_limits/shoulder_lift_joint/max_acceleration: 0
- /robot_description_planning/joint_limits/shoulder_lift_joint/max_velocity: 3.14
- /robot_description_planning/joint_limits/shoulder_pan_joint/has_acceleration_limits: False
- /robot_description_planning/joint_limits/shoulder_pan_joint/has_velocity_limits: True
- /robot_description_planning/joint_limits/shoulder_pan_joint/max_acceleration: 0
- /robot_description_planning/joint_limits/shoulder_pan_joint/max_velocity: 3.14
- /robot_description_planning/joint_limits/wrist_1_joint/has_acceleration_limits: False
- /robot_description_planning/joint_limits/wrist_1_joint/has_velocity_limits: True
- /robot_description_planning/joint_limits/wrist_1_joint/max_acceleration: 0
- /robot_description_planning/joint_limits/wrist_1_joint/max_velocity: 6.28
- /robot_description_planning/joint_limits/wrist_2_joint/has_acceleration_limits: False
- /robot_description_planning/joint_limits/wrist_2_joint/has_velocity_limits: True
- /robot_description_planning/joint_limits/wrist_2_joint/max_acceleration: 0
- /robot_description_planning/joint_limits/wrist_2_joint/max_velocity: 6.28
- /robot_description_planning/joint_limits/wrist_3_joint/has_acceleration_limits: False
- /robot_description_planning/joint_limits/wrist_3_joint/has_velocity_limits: True
- /robot_description_planning/joint_limits/wrist_3_joint/max_acceleration: 0
- /robot_description_planning/joint_limits/wrist_3_joint/max_velocity: 6.28
- /robot_description_semantic: <?xml version="1…
- /rosdistro: noetic
- /rosversion: 1.15.11
NODES
/
move_group (moveit_ros_move_group/move_group)
robot_state_publisher (robot_state_publisher/robot_state_publisher)
rviz_3_xterm_6407_5265797791390755144 (rviz/rviz)
ROS_MASTER_URI=http://3_simulation:11311
process[robot_state_publisher-1]: started with pid [6443]
process[move_group-2]: started with pid [6444]
process[rviz_3_xterm_6407_5265797791390755144-3]: started with pid [6445]
QStandardPaths: XDG_RUNTIME_DIR not set, defaulting to ‘/tmp/runtime-user’
[ INFO] [1690384864.193809584]: rviz version 1.14.9
[ INFO] [1690384864.193885069]: compiled against Qt version 5.12.8
[ INFO] [1690384864.193917133]: compiled against OGRE version 1.9.0 (Ghadamon)
[ INFO] [1690384864.228309524]: Forcing OpenGl version 0.
[ INFO] [1690384864.260969278]: Loading robot model ‘ur3e’…
[ WARN] [1690384864.264406509]: Skipping virtual joint ‘fixed_base’ because its child frame ‘base_link’ does not match the URDF frame ‘world’
[ INFO] [1690384864.264447510]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ INFO] [1690384864.452382069]: Stereo is NOT SUPPORTED
[ INFO] [1690384864.452495027]: OpenGL device: llvmpipe (LLVM 10.0.0, 256 bits)
[ INFO] [1690384864.452572298]: OpenGl version: 3.1 (GLSL 1.4).
[ INFO] [1690384869.868625804, 2118.872000000]: Publishing maintained planning scene on ‘monitored_planning_scene’
[ INFO] [1690384869.884663363, 2118.887000000]: Listening to ‘joint_states’ for joint states
[ INFO] [1690384869.931381907, 2118.937000000]: Listening to ‘/attached_collision_object’ for attached collision objects
[ INFO] [1690384869.931454356, 2118.937000000]: Starting planning scene monitor
[ INFO] [1690384869.954399452, 2118.961000000]: Listening to ‘/planning_scene’
[ INFO] [1690384869.954594319, 2118.961000000]: Starting world geometry update monitor for collision objects, attached objects, octomap updates.
[ INFO] [1690384869.981413896, 2118.990000000]: Listening to ‘/collision_object’
[ INFO] [1690384869.988289684, 2118.997000000]: Listening to ‘/planning_scene_world’ for planning scene world geometry
[ERROR] [1690384869.990967305, 2118.999000000]: No sensor plugin specified for octomap updater 0; ignoring.
[ INFO] [1690384870.059531696, 2119.063000000]: Loading planning pipeline ‘chomp’
[ INFO] [1690384870.149900637, 2119.152000000]: Using planning interface ‘CHOMP’
[ INFO] [1690384870.155795819, 2119.160000000]: Param ‘default_workspace_bounds’ was not set. Using default value: 10
[ INFO] [1690384870.157530046, 2119.161000000]: Param ‘start_state_max_bounds_error’ was set to 0.1
[ INFO] [1690384870.159541982, 2119.163000000]: Param ‘start_state_max_dt’ was not set. Using default value: 0.5
[ INFO] [1690384870.161404673, 2119.165000000]: Param ‘start_state_max_dt’ was not set. Using default value: 0.5
[ INFO] [1690384870.163446479, 2119.167000000]: Param ‘jiggle_fraction’ was not set. Using default value: 0.02
[ INFO] [1690384870.165820627, 2119.170000000]: Param ‘max_sampling_attempts’ was not set. Using default value: 100
[ INFO] [1690384870.165893526, 2119.170000000]: Using planning request adapter ‘Add Time Parameterization’
[ INFO] [1690384870.165961347, 2119.170000000]: Using planning request adapter ‘Resolve constraint frames to robot links’
[ INFO] [1690384870.166003320, 2119.170000000]: Using planning request adapter ‘Fix Workspace Bounds’
[ INFO] [1690384870.166042081, 2119.170000000]: Using planning request adapter ‘Fix Start State Bounds’
[ INFO] [1690384870.166082913, 2119.170000000]: Using planning request adapter ‘Fix Start State In Collision’
[ INFO] [1690384870.166125357, 2119.170000000]: Using planning request adapter ‘Fix Start State Path Constraints’
[ INFO] [1690384870.169092716, 2119.173000000]: Loading planning pipeline ‘ompl’
[ INFO] [1690384870.416378731, 2119.396000000]: Using planning interface ‘OMPL’
[ INFO] [1690384870.426340559, 2119.407000000]: Param ‘default_workspace_bounds’ was not set. Using default value: 10
[ INFO] [1690384870.428136064, 2119.408000000]: Param ‘start_state_max_bounds_error’ was set to 0.1
[ INFO] [1690384870.429681923, 2119.411000000]: Param ‘start_state_max_dt’ was not set. Using default value: 0.5
[ INFO] [1690384870.431069027, 2119.411000000]: Param ‘start_state_max_dt’ was not set. Using default value: 0.5
[ INFO] [1690384870.432835566, 2119.414000000]: Param ‘jiggle_fraction’ was not set. Using default value: 0.02
[ INFO] [1690384870.434020553, 2119.416000000]: Param ‘max_sampling_attempts’ was not set. Using default value: 100
[ INFO] [1690384870.434229206, 2119.417000000]: Using planning request adapter ‘Add Time Parameterization’
[ INFO] [1690384870.434264215, 2119.417000000]: Using planning request adapter ‘Resolve constraint frames to robot links’
[ INFO] [1690384870.434309631, 2119.417000000]: Using planning request adapter ‘Fix Workspace Bounds’
[ INFO] [1690384870.434376993, 2119.417000000]: Using planning request adapter ‘Fix Start State Bounds’
[ INFO] [1690384870.434414839, 2119.417000000]: Using planning request adapter ‘Fix Start State In Collision’
[ INFO] [1690384870.434441818, 2119.417000000]: Using planning request adapter ‘Fix Start State Path Constraints’
[ INFO] [1690384870.434543388, 2119.417000000]: Loading planning pipeline ‘pilz_industrial_motion_planner’
[ INFO] [1690384870.442584486, 2119.424000000]: Reading limits from namespace /robot_description_planning
[ INFO] [1690384870.646452965, 2119.591000000]: Available plugins: pilz_industrial_motion_planner::PlanningContextLoaderCIRC pilz_industrial_motion_planner::PlanningContextLoaderLIN pilz_industrial_motion_planner::PlanningContextLoaderPTP
[ INFO] [1690384870.646525459, 2119.591000000]: About to load: pilz_industrial_motion_planner::PlanningContextLoaderCIRC
[ INFO] [1690384870.655311639, 2119.599000000]: Registered Algorithm [CIRC]
[ INFO] [1690384870.655374389, 2119.599000000]: About to load: pilz_industrial_motion_planner::PlanningContextLoaderLIN
[ INFO] [1690384870.657779244, 2119.601000000]: Registered Algorithm [LIN]
[ INFO] [1690384870.657834137, 2119.601000000]: About to load: pilz_industrial_motion_planner::PlanningContextLoaderPTP
[ INFO] [1690384870.660059691, 2119.602000000]: Registered Algorithm [PTP]
[ INFO] [1690384870.660114741, 2119.602000000]: Using planning interface ‘Pilz Industrial Motion Planner’
[ INFO] [1690384870.700735808, 2119.643000000]: Loading robot model ‘ur3e’…
[ WARN] [1690384870.700801894, 2119.643000000]: Skipping virtual joint ‘fixed_base’ because its child frame ‘base_link’ does not match the URDF frame ‘world’
[ INFO] [1690384870.700829359, 2119.643000000]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ INFO] [1690384870.998930770, 2119.921000000]: Set joints of group ‘ur_manipulator’ to pose ‘home’.
[ INFO] [1690384870.999011056, 2119.921000000]: Set joints of group ‘gripper’ to pose ‘open’.
[ INFO] [1690384870.999565930, 2119.921000000]: Fake controller ‘fake_ur_manipulator_controller’ with joints [ shoulder_pan_joint shoulder_lift_joint elbow_joint wrist_1_joint wrist_2_joint wrist_3_joint ]
[ INFO] [1690384871.003290820, 2119.925000000]: Fake controller ‘fake_gripper_controller’ with joints [ egh_gripper_finger_left_joint ]
[ INFO] [1690384871.007824251, 2119.930000000]: Returned 2 controllers in list
[ INFO] [1690384871.076273061, 2119.998000000]: Trajectory execution is managing controllers
[ INFO] [1690384871.076386476, 2119.998000000]: MoveGroup debug mode is ON
Loading ‘move_group/ApplyPlanningSceneService’…
Loading ‘move_group/ClearOctomapService’…
Loading ‘move_group/MoveGroupCartesianPathService’…
Loading ‘move_group/MoveGroupExecuteTrajectoryAction’…
Loading ‘move_group/MoveGroupGetPlanningSceneService’…
Loading ‘move_group/MoveGroupKinematicsService’…
Loading ‘move_group/MoveGroupMoveAction’…
Loading ‘move_group/MoveGroupPickPlaceAction’…
Loading ‘move_group/MoveGroupPlanService’…
Loading ‘move_group/MoveGroupQueryPlannersService’…
Loading ‘move_group/MoveGroupStateValidationService’…
Loading ‘pilz_industrial_motion_planner/MoveGroupSequenceAction’…
[ INFO] [1690384871.346500107, 2120.253000000]: initialize move group sequence action
[ INFO] [1690384871.386732866, 2120.286000000]: Reading limits from namespace /robot_description_planning
Loading ‘pilz_industrial_motion_planner/MoveGroupSequenceService’…
[ INFO] [1690384871.541768296, 2120.442000000]: Reading limits from namespace /robot_description_planning
[ INFO] [1690384871.692222528, 2120.578000000]:
- MoveGroup using:
-
- ApplyPlanningSceneService -
- ClearOctomapService -
- CartesianPathService -
- ExecuteTrajectoryAction -
- GetPlanningSceneService -
- KinematicsService -
- MoveAction -
- PickPlaceAction -
- MotionPlanService -
- QueryPlannersService -
- StateValidationService -
- SequenceAction -
- SequenceService
[ INFO] [1690384871.692389126, 2120.579000000]: MoveGroup context using planning plugin ompl_interface/OMPLPlanner
[ INFO] [1690384871.692481355, 2120.579000000]: MoveGroup context initialization complete
You can start planning now!
[ INFO] [1690384873.188319618, 2121.962000000]: Loading robot model ‘ur3e’…
[ WARN] [1690384873.188404138, 2121.962000000]: Skipping virtual joint ‘fixed_base’ because its child frame ‘base_link’ does not match the URDF frame ‘world’
[ INFO] [1690384873.188439569, 2121.962000000]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ INFO] [1690384878.612121211, 2127.038000000]: Starting planning scene monitor
[ INFO] [1690384878.620046410, 2127.046000000]: Listening to ‘/move_group/monitored_planning_scene’
[ INFO] [1690384879.312035744, 2127.626000000]: No active joints or end effectors found for group ‘gripper’. Make sure that kinematics.yaml is loaded in this node’s namespace.
[ INFO] [1690384879.314189858, 2127.628000000]: No active joints or end effectors found for group ‘gripper’. Make sure that kinematics.yaml is loaded in this node’s namespace.
[ INFO] [1690384879.385553585, 2127.680000000]: Constructing new MoveGroup connection for group ‘gripper’ in namespace ‘’
[ INFO] [1690384880.359749356, 2128.595000000]: Ready to take commands for planning group gripper.
[ INFO] [1690384880.359870251, 2128.595000000]: Looking around: no
[ INFO] [1690384880.359921193, 2128.595000000]: Replanning: no