Hello,
I’m doing the create your control course and I noticed that there are some differences when using the example custom controller for joint 1 in the RRbot and using a effort_controllers/JointPositionController for the second joint. If you do a rostopic list, you can see this:
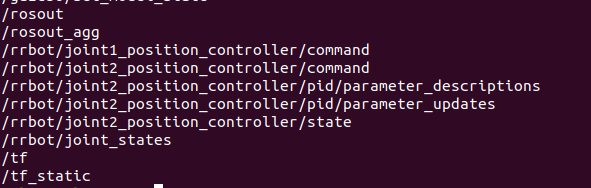
Where for the joint 2 you have the command and statetopics but for the first joint you only have one command topic.
the example code (slightly changed by me to create a PID controller) is this:
#include <controller_interface/controller.h>
#include <hardware_interface/joint_command_interface.h>
#include <pluginlib/class_list_macros.h>
#include <std_msgs/Float64.h>
/*
Here, you are just including some files from other packages that are needed in order to create the controller,
and declaring a namespace for this class (namespaces provide a method to prevent name conflicts in large projects).
*/
namespace controller_ns {
/*
Here you are just declaring the class, which will be inherited from hardware_interface::EffortJointInterface.
This means that this controller will be able to control only joints that use an effort interface.
*/
class MyPositionController : public controller_interface::Controller<hardware_interface::EffortJointInterface> {
public:
/*
Here, you are creating the init() function, which will be called when your controller is loaded by the controller manager.
Inside this function, you will get the name of the joint that you will control from the Parameter Server first (so from the YAML file, which you will modify later), and then you will get the joint object to use in the realtime loop.
*/
bool init(hardware_interface::EffortJointInterface *hw, ros::NodeHandle &n) {
std::string my_joint;
if (!n.getParam("joint", my_joint)) {
ROS_ERROR("Could not find joint name");
return false;
}
// Load gain using gains set on parameter server
if (!n.getParam("kp", kp_))
{
ROS_ERROR("Could not find the gain parameter value");
return false;
}
// Load gain using gains set on parameter server
if (!n.getParam("ki", ki_))
{
ROS_ERROR("Could not find the gain parameter value");
return false;
}
// Load gain using gains set on parameter server
if (!n.getParam("kd", kd_))
{
ROS_ERROR("Could not find the gain parameter value");
return false;
}
// Get joint handle from hardware interface
joint_ = hw->getHandle(my_joint); // throws on failure
command_position = joint_.getPosition(); // set the current joint goal to the current joint position
// Start command subscriber
sub_command_ = n.subscribe<std_msgs::Float64>("command", 1, &MyPositionController::setCommandCB, this);
// Start realtime state publisher
jointStatePublisher = node->advertise<sensor_msgs::JointState>("joint_state", 1);
return true;
}
/*
PID o EL CONTROL
*/
void update(const ros::Time &time, const ros::Duration &period) {
double dt = 0.01;
// compute position error
double current_pos = joint_.getPosition();
double error = command_position - current_pos;
// P term
double P = (error * kp_);
// I term
double integral = integral + (error * dt);
double I = ki_ * integral;
//D term
double derivative = error / dt;
double D = kd_ * derivative;
double Out = P + I + D;
joint_.setCommand(Out);
//publish state
jointStatePublisher.publish(jointState);
}
void setCommandCB(const std_msgs::Float64ConstPtr& msg)
{
command_position = msg->data;
}
/*
Here, you are starting and stopping the controller.
Note that:
float and double are not of integral or enumeration type so they ahve to be declared as constexpr, or non-static.
*/
void starting(const ros::Time &time) {}
void stopping(const ros::Time &time) {}
private:
hardware_interface::JointHandle joint_;
double kp_;
double ki_;
double kd_;
double command_position;
ros::Subscriber sub_command_;
};
/*
Here, you are calling the special macro plugin PLUGINLIB_EXPORT_CLASS
in order to allow this class to be dynamically loaded.
*/
PLUGINLIB_EXPORT_CLASS(controller_ns::MyPositionController,
controller_interface::ControllerBase);
} // namespace controller_ns
Please, can someone help me if I want to publish the the state of joint 1 just like joint2? It would be really great to plot both joint1 command and state to see the differences!
Thanks in advance