I am at the Ex 2.3 of the Manipulation course and trying to execute the plan and I see the following error


I have gone through my code multiple times for mistakes. What am I missing?
I am at the Ex 2.3 of the Manipulation course and trying to execute the plan and I see the following error
Hello @neilthomas110 ,
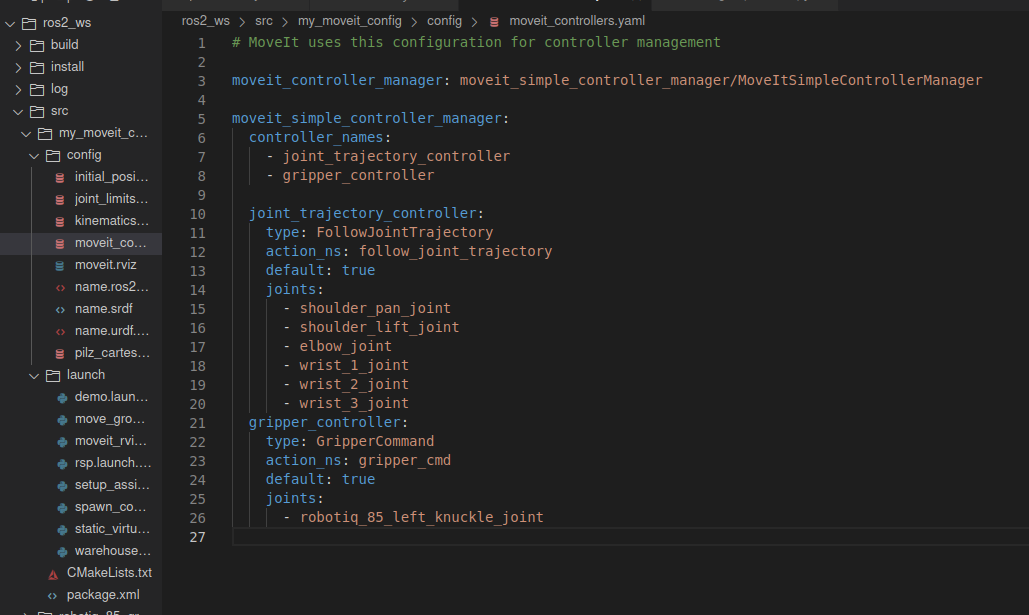
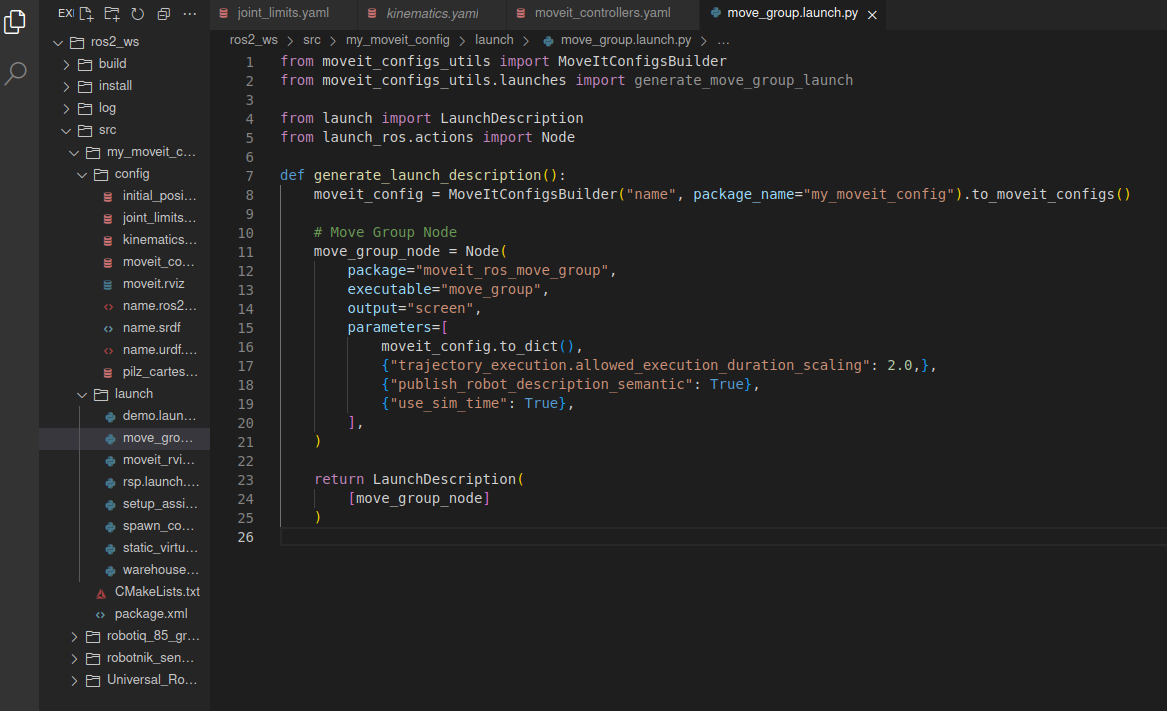
The error is clearly that, for some reason, the joint_trajectory_controller was not loaded by MoveIt2 (only the gripper_controller was loaded). Your files look correct to me, so I went to do some testing in your setup, and things are working alright. The joint_trajectory_controller is loaded properly and I can move the arm using your MoveIt2 package.
Can you please confirm this is working for you?
Best,
Yes it is working currently
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.