Running through exercise 4.1 and get this at the end when running the roslaunch command:
I try running roscd rrbot_bringup to find the package and it doesn’t exist. Is this a known error as I can’t figure out what’s going on with this exercise?
Running through exercise 4.1 and get this at the end when running the roslaunch command:
I try running roscd rrbot_bringup to find the package and it doesn’t exist. Is this a known error as I can’t figure out what’s going on with this exercise?
Hello @keegan.neave ,
Let me have a look at this and come back to you.
Thanks, I’ve really been struggling with this course and I’m not sure if it’s me or if there’s a few issues there 
Hello @keegan.neave ,
I’ve just rewritten exercise 4.1. So please, remove what you had and try to complete it again. It should work fine now. Also, please let me know any other issues you encountered while doing this course so that I can work on improving them.
Best,
Superb, thank you! I’m just working on the Open CV course at the minute and I’ll pick this up tomorrow 
I’ve got it launching and working now but I still found a few issues, I’ll detail what I did and hope it helps
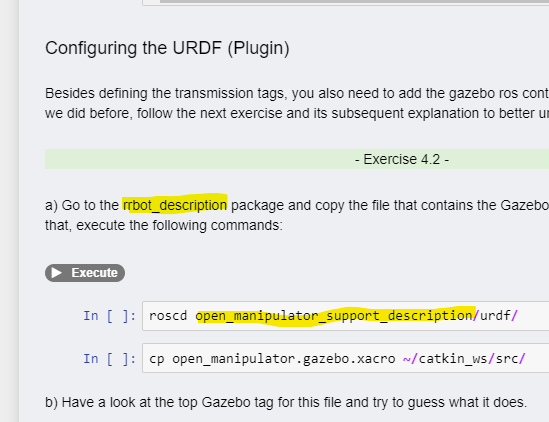
The text says rrbot_description but the command is to open_manipulator_support_derscription
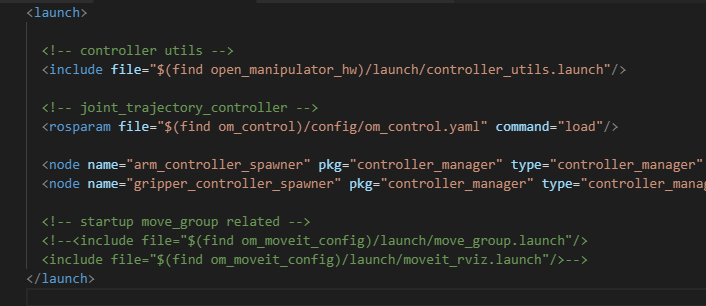
In the launch file it wasn’t pointing towards our new config file so I changed that:
To this:
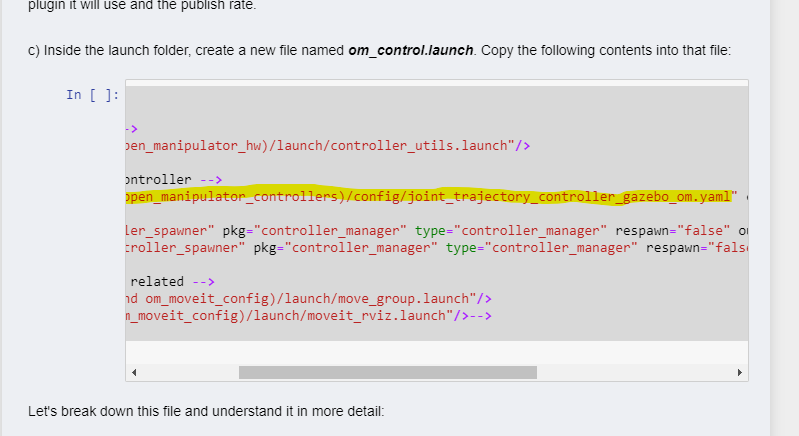
I think I’m supposed to run om_control.launch here but a different launch command is specified?
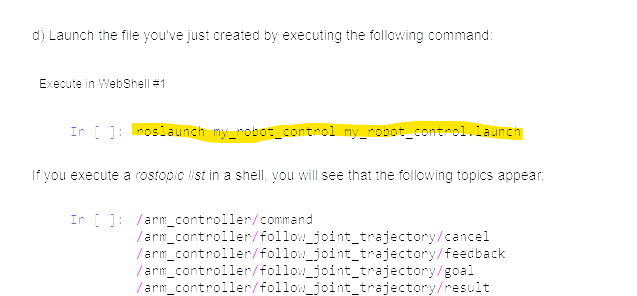
I was then able to get everything working fine and the arm_controllers appeared in the list of topics too.
I’m not sure if the above are there for the user to figure out how to do it themselves or not but I found it confusing. Hopefully this helps
Something odd seems to have happened in Unit 6 too, for one thing it refers to itself at the top as Chapter 4 still, but it just kinda ends without making use of anything we did to create the new package:
There’s a markdown error at the end and there’s nothing else but to click next to go to the next chapter. It feels like something is missing as there’s no “run this and you can see what you did” part.
Hello @keegan.neave ,
I’ve just fixed all the errors you pointed in the previous post, and I’ve also redone the launch file om_control.launch so that it makes more sense now (just in case you want to have a look at it).
About this last exercise, unfortunately, there’s nothing that can be executed. This last exercise code is to be executed inside a real robot since it manages all the connections with the servos. At this point we don’t have a way to allow students to run code directly inside a real robot, so we can only show the code as an example.
We are thinking of ways in which we can allow students to run code inside a real robot in the future.
Ah! Could be worth adding a note to say this in that case as that does indeed make sense