hi im just wodering if i use this line “self.publisher.publish(location)” to publish the location of an object where location is of type Point() and how would i be able to access that streamed information in my subscriber code ?
another question when i use the term msg is it somewhat of a print statemenet in a way .
any help with these questions would be great thank .
many thanks,
Kieran
The topic in question here is the key. You create a publisher of type Point to this topic, and also a subscriber of type Point to the same topic. Whenever you publish to the topic, the subscriber gets the message you publish in the subscriber callback.
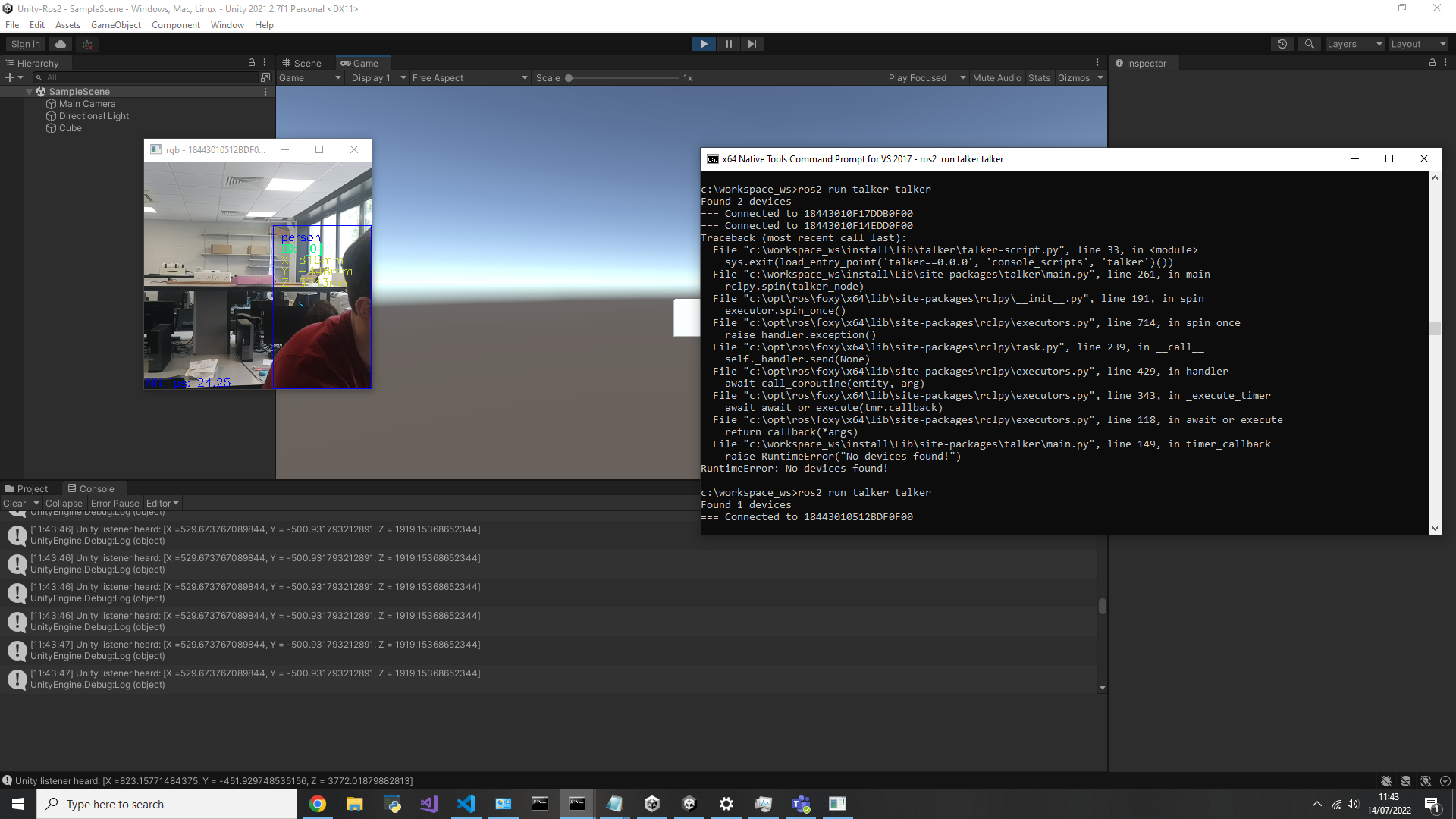
well i have that part working so im using computer vision to detect a person in a room then using ros2 to send taht position data into unity to spawn a person in that position but the trouble im having is accessing that data in unity inside my subscriber node . i want to be able to retrieve that prined out data and then spawn a person model into that position
As I have not worked with Unity (we are based on Gazebo), I may not be of much help here, but what you need to do is to somehow get Unity to read the data you have on a specific ros2 topic, to which you are publishing the position data. You may not even need to use a subscriber.
The first question you need to answer properly, how can I send some data to Unity? Can Unity read from a topic directly? Then you can take it from there.