I use it on ubuntu 22.04 and ros humble. I use the ur_description package from the UR robot homepage. Then I create the moveit package from moveit_setup_assistant as the lesson. But when I run 2 launch files at the same time (move_group and moveit_rviz), my rviz does not show the robot. So what should I do with my own system?
Hi @nguyentheanh311202 ,
Welcome to this Community!
If I understand correctly, you are trying to create a package in your own personal computer and not on The Construct rosject environment, is that correct?
If so, please post the errors that you see when you launch the move_group and moveit_rviz launch files. That will help us identify your issue and provide a suitable solution.
Regards,
Girish
exactly, you got my point.
Terminal 1: run $ ros2 launch my_ur_moveit_config move_group.launch.py
The result in tern1 is the same as in the construct rosject.
Terminal 2: run $ ros2 launch my_ur_moveit_config moveit_rviz.launch.py
$ ros2 launch my_ur_moveit_config moveit_rviz.launch.py
[INFO] [launch]: All log files can be found below /home/theanh3112/.ros/log/2024-12-17-23-17-35-383915-theanh3112-G5-GE-15666
[INFO] [launch]: Default logging verbosity is set to INFO
Using load_yaml() directly is deprecated. Use xacro.load_yaml() instead.
[INFO] [rviz2-1]: process started with pid [15667]
[rviz2-1] Warning: Ignoring XDG_SESSION_TYPE=wayland on Gnome. Use QT_QPA_PLATFORM=wayland to run on Wayland anyway.
[rviz2-1] [INFO] [1734452255.695634275] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-1] [INFO] [1734452255.695685894] [rviz2]: OpenGl version: 4.6 (GLSL 4.6)
[rviz2-1] [INFO] [1734452255.706652521] [rviz2]: Stereo is NOT SUPPORTED
[rviz2-1] Warning: class_loader.impl: SEVERE WARNING!!! A namespace collision has occurred with plugin factory for class rviz_default_plugins::displays::InteractiveMarkerDisplay. New factory will OVERWRITE existing one. This situation occurs when libraries containing plugins are directly linked against an executable (the one running right now generating this message). Please separate plugins out into their own library or just don't link against the library and use either class_loader::ClassLoader/MultiLibraryClassLoader to open.
[rviz2-1] at line 253 in /opt/ros/humble/include/class_loader/class_loader/class_loader_core.hpp
[rviz2-1] [ERROR] [1734452258.840894178] [moveit_ros_visualization.motion_planning_frame]: Action server: /recognize_objects not available
[rviz2-1] [INFO] [1734452258.854458878] [moveit_ros_visualization.motion_planning_frame]: MoveGroup namespace changed: / -> . Reloading params.
[rviz2-1] [ERROR] [1734452268.902059852] [rviz]: Could not find parameter robot_description and did not receive robot_description via std_msgs::msg::String subscription within 10.000000 seconds.
[rviz2-1] Error: Error document empty.
[rviz2-1] at line 100 in ./urdf_parser/src/model.cpp
[rviz2-1] Failed to parse robot description using: urdf_xml_parser/URDFXMLParser
[rviz2-1] [INFO] [1734452269.009567396] [moveit_rdf_loader.rdf_loader]: Unable to parse URDF
[rviz2-1] [ERROR] [1734452269.013329334] [moveit_ros.planning_scene_monitor.planning_scene_monitor]: Robot model not loaded
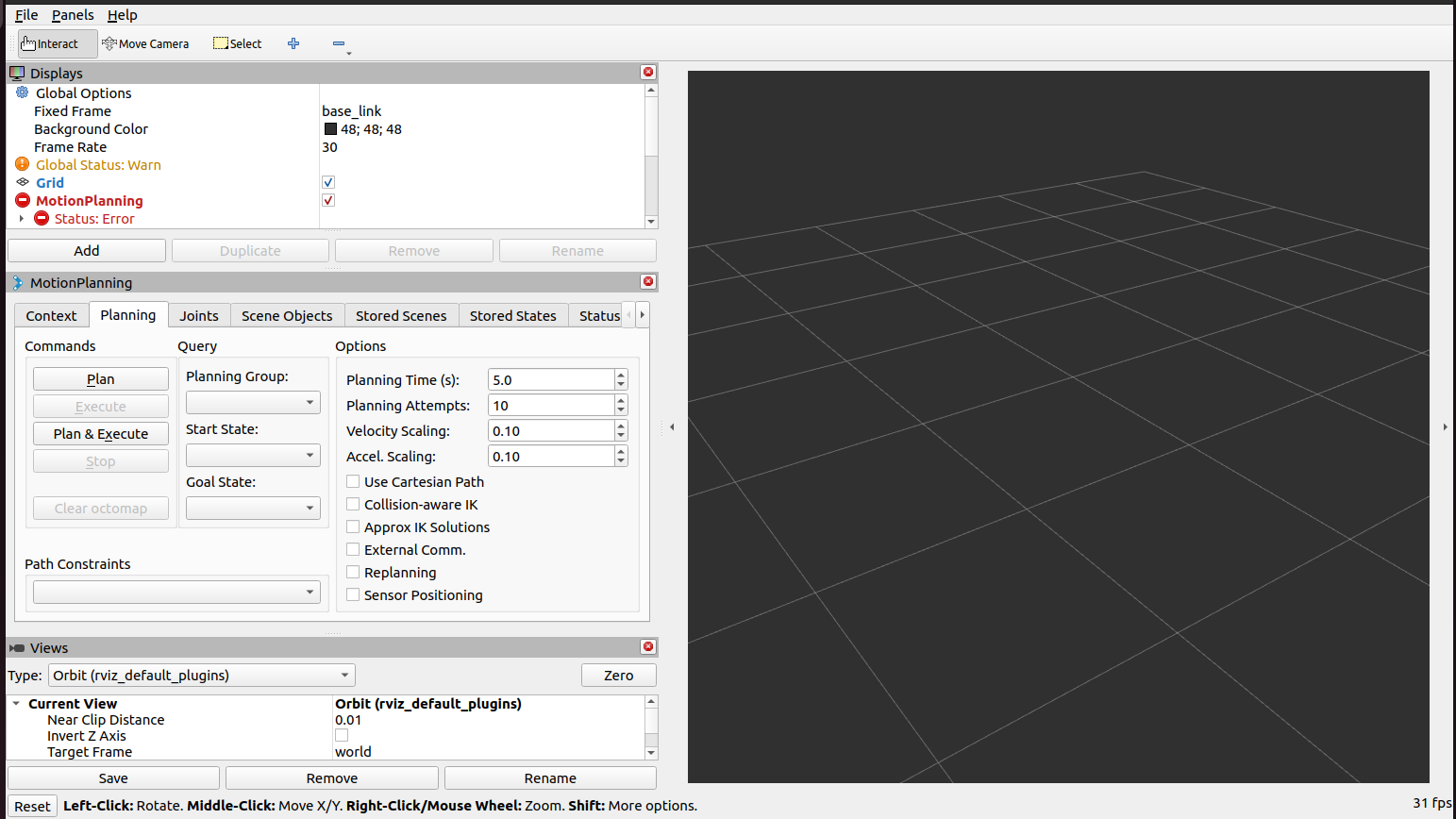
My rviz result is as shown below:
I also tried with packages downloaded from construct rosject
Hi @nguyentheanh311202 ,
Looking at your Terminal 2 results, I am assuming that the action server /recognize_objects is something from the course dependency files form The Construct. So naturally, it won’t be available on your personal computer, even if you copy the packages from the course onto your computer.
As for the robot not loading, you need to get the proper package for UR robots. Check if you have a ur_description package that contains all the necessary robot description files. You might have to make your MoveIt2 configuration package again using Setup Assistant on your computer. The path to packages may have changed when you copied/downloaded the UR robot files on to your computer.
Try to manually publish the robot description data into the respective robot description topic in a launch file and check if that works.
Regards,
Girish
This topic was automatically closed 5 days after the last reply. New replies are no longer allowed.